Механические характеристики электродвигателей. Механические характеристики электродвигателей и производственных механизмов
Принципиальная схема электродвигателя смешанного возбуждения приведена на рис. 1. В этом двигателе имеются две обмотки возбуждения – параллельная (шунтовая, ШО), подключенная параллельно цепи якоря, и последовательная (сериесная,СО), подключенная последовательно цепи якоря. Эти обмотки по магнитному потоку могут быть включены согласно или встречно.
Рис. 1 — Схема электродвигателя смешанного возбуждения
При согласном включении обмоток возбуждения их МДС складываются и результирующий поток Ф примерно равен сумме потоков, создаваемых обеими обмотками. При встречном включении результирующий поток равен разности потоков параллельной и последовательной обмоток. В соответствии с этим, свойства и характеристики электродвигателя смешанного возбуждения зависят от способа включения обмоток и от соотношения их МДС.
Скоростная характеристика n=f (I a) при U=U н и I в =const (здесь I в — ток в параллельной обмотке).
С увеличением нагрузки результирующий магнитный поток при согласном включении обмоток возрастает, но в меньшей степени, чем у двигателя последовательного возбуждения, поэтому скоростная характеристика в этом случае оказывается более мягкой, чем у двигателя параллельного возбуждения, но более жесткой, чем у двигателя последовательного возбуждения.
Соотношение между МДС обмоток может меняться в широких пределах. Двигатели со слабой последовательной обмоткой имеют слабо падающую скоростную характеристику (кривая 1, рис. 2).

Рис. 2 — Скоростные характеристики двигателя смешанного возбуждения
Чем больше доля последовательной обмотки в создании МДС, тем ближе скоростная характеристика приближается к характеристике двигателя последовательного возбуждения. На рис.2 линия 3 изображает одну из промежуточных характеристик двигателя смешанного возбуждения и для сравнения дана характеристика двигателя последовательного возбуждения (кривая 2).
При встречном включении последовательной обмотки с увеличением нагрузки результирующий магнитный поток уменьшается, что приводит к увеличению скорости двигателя (кривая 4). При такой скоростной характеристике работа двигателя может оказаться неустойчивой, т.к. поток последовательной обмотки может значительно уменьшить результирующий магнитный поток. Поэтому двигатели со встречным включением обмоток не применяются.
Механическая характеристика n=f (М) при U=U н и I в =const. двигателя смешанного возбуждения показана на рис.3 (линия 2).
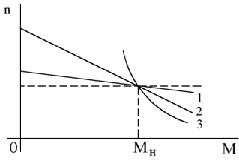
Рис. 3 — Механические характеристики двигателя смешанного возбуждения
Она располагается между механическими характеристиками двигателей параллельного (кривая 1) и последовательного (кривая 3) возбуждения. Подбирая соответствующим образом МДС обеих обмоток, можно получить электродвигатель с характеристикой, близкой к характеристике двигателя параллельного или последовательного возбуждения.
При проектировании электропривода электродвигатель должен выбираться так, чтобы его механические характеристики соответствовали механическим характеристикам производственного механизма. Механические характеристики дают взаимосвязь переменных в установившихся режимах.
Механической характеристикой механизма
называют зависимость между угловой скоростью и моментом сопротивления механизма, приведенными к валу двигателя) ω
= f(Mс).

Рис. 1. Механические характеристики механизмов
Среди всего многообразия выделяют несколько характерных типов механических характеристик механизмов:
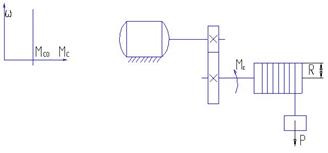
1. Характеристика с моментом сопротивления, не зависящим от скорости (прямая 1 на рис. 1). Независимая от скорости механическая характеристика графически изображается прямой, параллельной оси вращения, в данном случае вертикалью. Такой характеристикой обладают, например, подъемные краны, лебедки, поршневые насосы при неизменной высоте подачи и др.
2. Характеристика с моментом сопротивления линейно зависящим от скорости (прямая 2 на рис. 1). Такая зависимость присуща, например, приводу генератора постоянного тока с независимым возбуждением, работающему на постоянную нагрузку.
3. Характеристика с нелинейным возрастанием момента (кривая 3 на рис. 1). Типичными примерами емогут служить характеристики вентиляторов, центробежных насосов, гребных винтов. Для этих механизмов момент Мс зависит от квадрата угловой скорости
ω
. Это т.н. параболичская (вентиляторная) механическая характеристика.
4. Характеристика с нелинейно спадающим моментом сопротивления (кривая 4 на рис. 1). Здесь момент сопротивления обратно пропорционален скорости вращения. Мощность в этом случае остается постоянной на всем диапазоне рабочей скорости механизма. Например, у механизмов главного движения некоторых металлорежущих станков (токарных, фрезерных, расточных) момент Мс изменяется обратно пропорционально ω
, а мощность потребляемая механизмом, остается постоянной.
Механической характеристикой электродвигателя
называется зависимость его угловой скорости от вращающего момента ω
д = f(M).Здесь следует иметь ввиду, что момент М на валу двигателя независимо от направления вращения имеет положительный знак - момент движущий. Вместе с тем момент сопротивления Мс имеет знак отрицательный.
В качестве примеров на рис. 2 приведены механические характеристики: 1 - синхронного двигателя; 2 – двигателя постоянного тока независимого возбуждения; 3 – двигателя постоянного тока последовательного возбуждения.
![]()
Рис. 2. Механические характеристики электродвигателей
Для оценки свойств механических характеристик электропривода используют понятие жесткости характеристики. Жесткость механической характеристики определяется по выражению
β = dМ /dω
где d М – изменение момента двигателя; d ω д – соответствующее изменение угловой скорости.
Для линейных характеристик значение β остается постоянным, для нелинейных – зависит от рабочей точки.
Используя это понятие, характеристики, приведенные на рис. 2, можно качественно оценить так: 1 – абсолютно жесткая (β
= ∞
); 2 – жесткая; 3 – мягкая.
Абсолютно жесткая характеристика - скорость вращения двигателя остается неизменной при изменении нагрузки двигателя в пределах от нуля для номинальной. Такой характеристикой обладают синхронные двигатели.
Жесткая характеристика - скорость вращения меняется незначительно при изменении нагрузки от нуля до номинальной. Такой характеристикой обладает двигатель постоянного тока с параллельным возбуждением, а также асинхронный двигатель в области линейной части характеристики.
Мягкая характеристика
- скорость вращения двигателя меняется значительно при сравнительно небольших изменениях нагрузки. Такой характеристикой обладает двигатель постоянного тока с последовательным, смешанным или с параллельным возбуждением, но с добавочным сопротивлением в цепи якоря, а также асинхронный с сопротивлением в цепи ротора.
Для большинства производственных механизмов используют асинхронные двигатели с короткозамкнутым ротором, имеющие жесткую механическую характеристику.
Все механические характеристики электродвигателей делятся на естественные и искусственные.
Естественная механическая характеристика
относится к условиям работы двигателя с номинальными значениями параметров.
Например, для двигателя с параллельным возбуждением естественная характеристика может быть построена для случая, когда напряжение на якоре и ток возбуждения имеют номинальные значения, а в цепи якоря отсутствует добавочное сопротивление.
Естественная характеристика асинхронного двигателя соответствует номинальному напряжению и номинальной частоте переменного тока, подводимого к статору двигателя при условия отсутствия добавочного сопротивления в цепи ротора.
Таким образом, для каждого двигателя естественная характеристика может быть построена только одна, а искусственных - неограниченное количество. Например, каждому новому значению сопротивления якоря двигателя постоянного тока или в цепи ротора асинхронного двигателя отвечает своя механическая характеристика.
Механической характеристикой двигателя называется зависимость частоты вращения ротора от момента на валу n = f (M2). Так как при нагрузке момент холостого хода мал, то M2 ≈ M и механическая характеристика представляется зависимостью n = f (M). Если учесть взаимосвязь s = (n1 - n) / n1, то механическую характеристику можно получить, представив ее графическую зависимость в координатах n и М (рис. 1).
Рис. 1. Механическая характеристика асинхронного двигателя
Естественная механическая характеристика асинхронного двигателя соответствует основной (паспортной) схеме его включения и номинальным параметрам питающего напряжения. Искусственные характеристики получаются, если включены какие-либо дополнительные элементы: резисторы , реакторы , конденсаторы . При питании двигателя не номинальным напряжением характеристики также отличаются от естественной механической характеристики.
Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода.
Основные точки механической характеристики: критическое сколь-жение и частота, максимальный момент, пусковой момент, номинальный момент.
Механическая характеристика - это зависимость вращающего момента от скольжения, или, иначе говоря, от числа оборотов:
![]()
Из выражения  видно, что эта зависимость очень сложна, поскольку, как показывают формулы)
видно, что эта зависимость очень сложна, поскольку, как показывают формулы)  и
и  , скольжение входит также в выражения для I
2
и cos ? 2
. Механическая характеристика асинхронного двигателя дается обычно графически
, скольжение входит также в выражения для I
2
и cos ? 2
. Механическая характеристика асинхронного двигателя дается обычно графически
Начальная точка характеристики соответствует n = 0 и s = 1: это первое мгновение пуска двигателя. Величина пускового вращающего момента M n - очень важная характеристика эксплуатационных свойств двигателя. Если M n мал, меньше номинального рабочего момента, двигатель может запускаться только вхолостую или при соответственно сниженной механической нагрузке.
Обозначим символом M np противодействующий (тормозной) момент, создаваемый механической нагрузкой на валу, при которой двигатель пускается. Очевидным условием для возможности запуска двигателя является: M n > M np . Если это условие выполнено, ротор двигателя придет в движение, число оборотов его n будет возрастать, а скольжение s уменьшаться. Как видно из изображения выше, вращающий момент двигателя при этом растет от M n до максимального M m , соответствующего критическому скольжению s kp , следовательно, растет и избыточная располагаемая мощность двигателя, определяемая разностью моментов M и M np .
Чем больше разность между располагаемым моментом двигателя (возможным при данном скольжении по рабочей характеристике) М и противодействующим М np , тем легче режим запуска и тем быстрее двигатель достигает установившейся скорости вращения.
Как показывает механическая характеристика, при некотором числе оборотов (при s = s kp ) располагаемый вращающий момент двигателя достигает максимально возможного для данного двигателя (при данном напряжении U ) значения M т . Далее двигатель продолжает увеличивать скорость вращения, но располагаемый вращающий момент его быстро уменьшается. При каких-то значениях n и s вращающий момент двигателя становится равным противодействующему: пуск двигателя заканчивается, число оборотов его устанавливается на значении, соответствующем соотношению:
![]()
Это соотношение является обязательным для всех нагрузочных режимов двигателя, то есть для всех значений M np , не выходящих за пределы максимального располагаемого вращающего момента двигателя М т . В этих пределах двигатель сам автоматически приспосабливается ко всем колебаниям нагрузки: если во время работы двигателя его механическая нагрузка увеличивается, на какое-то мгновение M np станет больше момента, развиваемого двигателем. Обороты двигателя начнут снижаться, а момент увеличиваться.
Скорость вращения установится на новом уровне, отвечающем равенству M и M np . При снижении нагрузки процесс перехода к новому нагрузочному режиму будет обратным.
Если нагрузочный момент M np превысит М т , двигатель сразу остановится, так как с дальнейшим уменьшением оборотов вращающий момент двигателя уменьшается.
Поэтому максимальный момент двигателя М т называется еще опрокидывающим или критическим моментом.
Если в формулу момента ![]() подставить:
подставить:
то получим:

Взяв первую производную от М по и приравняв ее к нулю, найдем, что максимальное значение вращающего момента наступает при условии:
то есть при таком скольжении s = s kp , при котором активное сопротивление ротора равно индуктивному сопротивлению
![]()
Значения s kp у большинства асинхронных двигателей лежат в пределах 10 - 25%.
Если в написанную выше формулу момента вместо активного сопротивления r 2 подставить индуктивное по формуле
![]()

Максимальный вращающий момент асинхронного двигателя пропорционален квадрату магнитного потока (а значит, и квадрату напряжения) и обратно пропорционален индуктивности рассеяния обмотки ротора.
При постоянстве напряжения, подводимого к двигателю, его поток Ф остается практически неизменным.
Индуктивность рассеяния роторной цепи тоже практически постоянна. Поэтому при изменении активного сопротивления в цепи ротора максимальное значение вращающего момента M т изменяться не будет, но будет наступать при разных скольжениях (с увеличением активного сопротивления ротора - при больших значениях скольжения).
Очевидно, что максимум возможной нагрузки двигателя определяется значением его M т . Рабочая часть характеристики двигателя лежит в узком диапазоне чисел оборотов от n , соответствующего M т , до. При n = n 1 (конечная точка характеристики) М = 0, так как при синхронной скорости ротора s = 0 и I 2 = 0.
Номинальный вращающий момент, определяющий значение паспортной мощности двигателя, принимается обычно равным 0,4 - 0,6 от M т . Таким образом, асинхронные двигатели допускают кратковременные перегрузки в 2 - 2,5 раза.
Основным параметром, характеризующим режим работы асинхронного двигателя, является скольжение s - относительная разность частоты вращения ротора двигателя n и его поля n о: s = (n o - n) / n o .
Область механической характеристики, соответствующая 0 ≤ s ≤ 1 - область двигательных режимов, причем при s < s кр работа двигателя устойчива, при s > s кр - неустойчива. При s < 0 и s > 1 момент двигателя направлен против направления вращения его ротора (соответственно рекуперативное торможение и торможение противовключением).
Устойчивый участок механической характеристики двигателя часто описывается формулой Клосса , подстановкой в которую параметров номинального режима можно определить критическое скольжение s кр:
 ,
,
где: λ = M kp / M н - перегрузочная способность двигателя.
Механическая характеристика по данным справочника или каталога приближенно может быть построена по четырем точкам (рис. 7.1):

Точка 1 - идеальный холостой ход, n = n o = 60 f / p, М = 0, где: р - число пар полюсов магнитного поля двигателя;
Точка 2 - номинальный, режим: n = n н, М = М н = 9550 P н / n н, где P н - номинальная мощность двигателя в кВт;
Точка 3 - критический режим: n = n кр, М = М кр =λ М н;
Точка 4 - режим пуска: n = 0, М = М пуск = β М н.
При анализе работы двигателя в диапазоне нагрузок до М н и несколько больше устойчивый участок механической характеристики можно приближенно описать уравнением прямой линии n = n 0 - вМ, где коэффициент “в” легко определяется подстановкой в уравнение параметров номинального режима n н и М н.
Конструкция обмоток статора. Однослойные и двухслойные петле-вые обмотки.
По конструкции катушек обмотки подразделяют на всыпные с мягкими катушками и обмотки с жесткими катушками или полукатушками. Мягкие катушки изготовляют из круглого изолированного провода. Для придания требуемой формы их предварительно наматывают на шаблоны, а затем укладывают в изолированные трапецеидальные пазы (см. рис. 3.4, в , г и 3.5, в ); междуфазовые изоляционные прокладки устанавливают в процессе укладки обмотки. Затем катушки укрепляют в пазах с помощью клиньев или крышек, придают им окончательную форму (формируют лобовые части), осуществляют бандажирование обмотки и ее пропитку. Весь процесс изготовления всыпных обмоток можно полностью механизировать.
Жесткие катушки (полукатушки) изготовляют из прямоугольного изолированного провода. Окончательную форму им придают до укладки в пазы; одновременно на них накладывают корпусную и междуфазовую изоляцию. Затем катушки укладывают в предварительно изолированные открытые или полуоткрытые пазы , укрепляют и подвергают пропитке.
1. Однослойные обмотки - наиболее пригодны для механизированной укладки, так как в этом случае обмотка должна быть концентрической и укладываться в пазы статора обеими сторонами катушки одновременно. Однако применение их приводит к увеличенному расходу обмоточного провода из-за значительной длины лобовых частей. Кроме того, в таких обмотках не представляется возможным выполнить укорочение шага, что приводит к ухудшению формы магнит-ного поля в воздушном зазоре, увеличению добавочных потерь, возникновению провалов в механической характеристике и повышению шума. Однако из-за своей простоты и дешевизны такие обмотки широко применяют в асинхронных двигателях небольшой мощности до 10-15 кВт.
2. Двухслойные обмотки - позволяют выполнить укорочение шага обмотки на любое количество зубцовых делений, благодаря чему улучшается форма магнитного поля, создаваемого обмоткой, и подавляются высшие гармонические в кривой ЭДС. Кроме того, при двухслойных обмотках получается более простая форма лобовых соединений, что упрощает изготовление обмоток. Такие обмотки применяют для двигателей мощностью свыше 100 кВт с жесткими катушками, которые укладывают вручную.
Обмотки статора. Однослойные и двухслойные волновые обмотки
В пазах сердечника статора раз-мещается многофазная обмотка, которая подсоединяется к сети переменного тока. Многофазные симметричные обмотки с числом фаз т включают в себя т фазных обмоток, которые соединяются в звезду или многоугольник. Так, например, в случае трехфазной обмотки статора число фаз т = 3 и обмотки могут соединяться в звезду или треугольник. Между собой обмотки фаз смещены на угол 360/т град; для трехфазной обмотки этот угол равен 120°.
Обмотки фаз выполняются из отдельных катушек, соединенных последовательно, параллельно либо последовательно-параллельно. В данном случае под катушкой подразумеваются несколько последовательно соединенных витков обмотки статора, размещенных в одних и тех же пазах и имеющих общую изоляцию относительно стенок паза. В свою очередь витком считаются два активных (т. е. расположенных в самом сердечнике статора) проводника, уложенных в двух пазах под соседними разноименными полюсами и соединенных друг с другом последовательно. Проводники, расположенные вне сердечника статора и соединяющие активные проводники между собой, называются лобовыми частями обмотки. Прямолинейные части катушек обмоток, уложенные в пазы, называются сторонами катушек или пазовыми частями.
Пазы статора, в которые укладываются обмотки, образуют на внутренней стороне статора так называемые зубцы. Расстояние между центрами двух соседних зубцов сердечника статора, измеренное по его поверхности, обращенной к воздушному зазору, называется зубцовым делением или пазовым делением.
Многослойные цилиндрические катушечные обмотки (рисунок 3) наматываются из круглого провода и состоят из многослойных дисковых катушек, расположенных вдоль стержня. Между катушками (через каждую катушку или через две-три катушки) могут быть оставлены радиальные каналы для охлаждения. Такие обмотки применяются на стороне высшего напряжения при S ст ≤ 335 кВ×А, I ст ≤ 45 А и U л.н ≤ 35 кВ.
Однослойные и двухслойные цилиндрические обмотки (рисунок 4) наматываются из одного или нескольких (до четырех) параллельных прямоугольных проводников и применяются при S ст ≤ 200 кВ×А,I ст ≤ 800 А и U л.н ≤ 6 кВ.
Статической механической характеристикой двигателя называется зависимость скорости от момента двигателя. w=¦(М). Почти все электродвигатели обладают тем свойством, что скорость их является убывающей функцией момента двигателя. Это относится ко всем обычным электродвигателям, применяемым в промышленности, то есть к двигателям постоянного тока независимого, последовательного и смешанного возбуждения, а также к асинхронным бесколлекторным и коллекторным двигателям переменного тока. Однако степень изменения скорости с изменением момента у разных двигателей различна и характеризуется так называемой жесткостью их механических характеристик.
Жесткость механической характеристики электропривода – это отношение приращения момента, развиваемых электродвигательным устройством, при изменении скорости, к соответствующей разности угловых скоростей электропривода:
![]()
Обычно на рабочих участках механические характеристики двигателей имеют отрицательную жесткость β<0. Линейные механические характеристики обладают постоянной жесткостью. В случае нелинейных характеристик их жесткость не постоянна и определяется в каждой точке как производная момента по угловой скорости
Жесткость механической характеристики в геометрическом смысле – это наклон механической характеристики двигателя.
Если сравнить характеристики 1 и 2, то характеристика 1 более мягкая, т.к. наклон ее меньше
DМ 1 >DМ 2 Þ b 1 >b 2 , так как и .
Механические характеристики электродвигателей можно разделить на четыре основные категории:
1. Абсолютно жесткая механическая характеристика (β = ∞) - это характеристика, при которой скорость с изменением момента остается неизменной. Такой характеристикой обладают синхронные двигатели (прямая 1 на рис.1).
2. Жесткая механическая характеристика - это характеристика, при которой скорость с изменением момента хотя и уменьшается, но в малой степени. Жесткой механической характеристикой обладают двигатели постоянного тока независимого возбуждения, а также асинхронные двигатели в пределах рабочей части механической характеристики (кривая 2 на рис.1).
Для асинхронного двигателя жесткость в различных точках механической характеристики различна. Между максимальными (критическими) значениями моментов в двигательном Мк,д и генераторном Мк,г режимах характеристика асинхронного двигателя имеет сравнительно большую жесткость.
 3. Мягкая механическая характеристика
- это характеристика, при которой с изменением момента скорость значительно изменяется. Такой характеристикой обладают двигатели постоянного тока последовательного возбуждения, особенно в зоне малых моментов (кривая 3 на рис.2). Для этих двигателей жесткость не остается постоянной для всех точек характеристик.
3. Мягкая механическая характеристика
- это характеристика, при которой с изменением момента скорость значительно изменяется. Такой характеристикой обладают двигатели постоянного тока последовательного возбуждения, особенно в зоне малых моментов (кривая 3 на рис.2). Для этих двигателей жесткость не остается постоянной для всех точек характеристик.
Двигатели постоянного тока смешанного возбуждения могут быть отнесены ко второй или третьей группе в зависимости от значения жесткости механической характеристики.
4. Абсолютно мягкая механическая характеристика (β=0) - это характеристика, при которой момент двигателя с изменением угловой скорости остается неизменным. Такой характеристикой обладают, например, двигатели постоянного тока независимого возбуждения при питании их от источника тока или при работе в замкнутых системах электропривода в режиме стабилизации тока якоря (прямая 4 на рис. 2).
Механическая характеристика рабочей машины – это зависимость скорости рабочей машины от момента сопротивления, который она создает w=¦(М с).
Механические характеристики описывают нагрузку на электропривод.
Классификация типовые нагрузок:
1. активный момент сопротивления М с =const
Пример: привод лебедки подъемного крана.
Нагрузка способна сама приводить в действие механизм, поэтому ее называют активной. Конструкции необходимо предусмотреть стояночный тормоз.
2. реактивный момент сопротивления М с =const (нагрузка типа постоянства момента)
Характерно для механизмов типа "сухого трения".

М с =М 0 sign(w).
w>0 Þ М с >0; w<0 Þ М с <0.
Реактивный момент является реакцией на скорость w.
3. вязкое трение
М с = α в.т ω
Момент сопротивления пропорционален скорости.

bвт – коэффициент вязкого трения.
4. вентиляционный момент

М с =kw 2 sign(w).
Характерно для центробежных вентиляторов и насосов.
Если закрыть входное отверстие уменьшится момент нагрузки.
P=M c w - мощность.
5. постоянство мощности P=const
Где Р с =const.
Часто используется для главных приводов станочных механизмов (токарных, фрезерных, расточных, шлифовальных и других станков).
w max ∙M min =w min ∙M max =const.
Рассмотрим токарную обработку:
w= const, F p = const.



Для строгального станка:
Р 1 =v min ∙F max – рабочий ход, Р 1 =v max ∙F min – холостой ход.
Р 1 »Р 2 =const.
Особенности выбора двигателя:
При P 1 =5 кВт получим P дв =5∙100=500 кВт.
Непосредственный выбор двигателя по предельным показателям приводит к завышению установленной мощности двигателя в D w раз, где D w – диапазон регулирования скорости. На самом деле мощность двигателя может быть снижена специально, выбором диапазона регулирования скорости.
Для ДПТ НВ – это управление скоростью по токам возбуждения.
Электродвигателем параллельного возбуждения называется двигатель постоянного тока, обмотка возбуждения которого включена параллельно обмотке якоря (рис. 1). При снятии характеристик к цепи якоря подводится номинальное напряжение U н =const.
Рис. 1 — Схема двигателя параллельного возбуждения
Ток, потребляемый двигателем из сети, определяется суммой I=I a +I в, ток возбуждения обычно равен I в =(0,03...0,04) I н. Все характеристики двигателя снимаются при постоянных сопротивлениях в цепях возбуждения r в =const и якоря
Скоростная характеристика.
Зависимость n=f (I a) при U н =const и I в =const
Из уравнения ЭДС для электродвигателя
![]()
![]()
Как видно из выражения,частота вращения двигателя зависит от двух факторов — изменения тока нагрузки и потока. При увеличении тока нагрузки падение напряжения в сопротивлении цепи якоря увеличивается, а частота вращения двигателя уменьшается.
Поперечная реакция якоря размагничивает двигатель, т.е. с ростом тока I a уменьшается поток и, следовательно, увеличиваются обороты двигателя. Таким образом, оба фактора действуют в отношении оборотов машины встречно и вид скоростной характеристики будет определяется их результирующим действием.
На рис. 2 показаны три разные скоростные характеристики двигателя (кривые 1,2,3). Кривая 1 — скоростная характеристика при преобладании влияния I a ∑r,кривая 2 — оба фактора приблизительно уравновешиваются, кривая 3 — преобладает фактор размагничивающего действия реакции якоря.

Рис. 2 — Характеристики двигателя параллельного возбуждения
Ввиду того, что в реальных двигателях изменение потока Ф незначительно, скоростная характеристика является практически прямой линией. На ряде современных машин параллельного возбуждения для компенсации влияния поперечной реакции якоря устанавливается дополнительная стабилизирующая обмотка возбуждения, которая полностью или частично компенсирует влияние реакции якоря.
Нормальной формой скоростной характеристики, при которой обеспечивается устойчивая работа двигателя, является характеристика вида кривой 1.
Наклон характеристики определяется величиной сопротивления цепи якоря Σr без учета реакции якоря. Когда добавочных сопротивлений в цепь якоря не включено, характеристика называется естественной. Естественная характеристика двигателя параллельного возбуждения достаточно жесткая. Обычно, где n o — частота вращения при холостом ходе. При включении в цепь якоря добавочных сопротивлений R рг, наклон характеристик увеличивается, они становятся «мягкими» и называются искусственными или реостатными.
Моментная характеристика – это зависимость М=f (I a) при r в =const, U=U н и Σr=const. В установившемся режиме работы двигателя согласно
имеем M эм = M 2 +M 0 = с м I a Ф. Если бы в процессе работы машины поток Ф не изменялся, то моментная характеристика представляла бы собой прямую (характеристика 4, рисунок 2). В действительности поток Ф с ростом тока I a несколько уменьшается из-за размагничивающего действия реакции якоря, поэтому моментная характеристика слегка наклонена вниз (кривая 5). Характеристика полезного момента располагается ниже кривой электромагнитного момента на величину момента холостого хода (кривая 6).
Характеристика КПД η=f (I a) снимается при U=U н, r в =const, Σr=const и имеет типичный для электродвигателей вид (характеристика 7 на рис. 2). КПД быстро растет при увеличении нагрузки от холостого хода до 0,25Р н, достигает максимального значения при Р=(0,5...0,75) Р н, а затем до Р=Р н остается почти неизменным. Обычно в двигателях малой мощности η=0,75...0,85, а в двигателях средней и большой мощности η=0,85...0,94.
Механическая характеристика представляет зависимость n=f (M) при U=U н, I в =const и Σr=const. Аналитическое выражение для механической характеристики можно получить из уравнения ЭДС электродвигателя
Определив ток I а из выражения М = с е I a Ф и подставив это значение тока в выражение выше, получим
![]()
Если пренебречь реакцией якоря и считать, что поток Ф не изменяется, то механические характеристики электродвигателя параллельного возбуждения можно представить в виде прямых (рис. 3), наклон которых зависит от величины сопротивления R рг включенного в цепь якоря. При R рг =0 характеристика называется естественной.

Рис. 3 — Механические характеристики двигателя параллельного возбуждения
Следует помнить, что при обрыве цепи возбуждения I в =0 обороты двигателя n→∞, т.е. двигатель идет «вразнос», поэтому его необходимо немедленно отключить от сети.