Из состоит машина переменного тока. §3.1.конструктивная схема и устройство машины переменного тока. Большая энциклопедия нефти и газа
Машины переменного тока по устройству немного отличаются от машин постоянного тока. Каждая машина состоит из двух основных частей: неподвижной части, называемой статором, и вращающейся части, называемой ротором. В отличие от машин постоянного тока у машин переменного тока на статоре укладывают обмотку якоря, а на роторе - обмотку возбуждения. Вместо коллектора на роторе имеются изолированные кольца, по которым ток проводится в обмотку возбуждения. Машины переменного тока бывают синхронные и асинхронные.
Для расчета требуемой входной частоты, когда количество полюсов и скорости известны. Синхронные двигатели и коммутируемая работа. В двигателях с переключаемой сопротивлением катушки статора синхронно включаются с вращением ротора с перекрывающимися фазами. В то время как двигатели с сопротивлением обычно используются в качестве ступенчатых ступеней с разомкнутым контуром, их производная с переключением с откатом обычно работает под управлением с замкнутым контуром. На самом деле, шаговые двигатели несколько похожи на коммутируемое сопротивление и шаг в каждое заданное положение ротора, что приводит к высокой повторяемости и точности. Электродвигатели с переключаемым сопротивлением обеспечивают высокую эффективность и контроль, а также обеспечивают 100% -ный крутящий момент в стойле неограниченно - полезны для приложений, требующих удержания. В частности, при запуске зубчатое колесо возникает из-за взаимодействия роторных магнитов и обмотки статора при его подпитании из-за гармоник.
Си н х р о н н ы м и называются такие машины переменного тока, частота вращения которых определяется частотой тока. С изменением частоты тока у таких машин одновременно (синхронно) меняется частота вращения. Как правило, у синхронных машин по обмотке возбуждения проходит постоянный ток от постороннего источника. Синхронные машины обратимы, т. е. могут работать в качестве генераторов и электродвигателей. Конструкция синхронного двигателя почти не отличается от конструкции синхронного генератора.
В свою очередь, зубчатый зазор вызывает шум, вибрацию и неравномерное вращение. Многие способы уменьшения зубцов могут быть использованы для устранения крутящего момента и пульсации скорости. Обратная связь позволяет приводу отслеживать точное положение ротора - для обеспечения истинного бесконечного диапазона скоростей, включая полный крутящий момент при нулевой скорости. Ссылка на скорость, требуемая от внешнего источника, может быть аналоговым или энкодерным сигналом или последовательной командой от устройства обратной связи по оси, которую вы хотите выполнить.
Так как на судах морского флота цепи переменного тока питаются от трехфазных синхронных генераторов, то остановимся на их устройстве и принципе работы.
Обмотка якоря трехфазного синхронного генератора располагается в статоре и состоит из трех отдельных обмоток-фаз, сдвинутых относительно друг друга на 120°С (1/3 периода) с таким расчетом, чтобы индуктируемая э. д. с. в каждой фазе достигала своего максимума спустя 1/3 периода после максимума э. д. с. соседней фазы. Обмотку возбуждения укладывают на роторе, и источником питания для нее может быть небольшой генератор постоянного тока (возбудитель), смонтированный па одном валу с синхронным генератором, или даже аккумуляторная батарея.
Обычно это сигнал скорости, который иногда обрабатывается в драйвере до его использования в качестве команды. Двигатель подключен к электронному приводу, а его электронные компоненты рассчитаны на максимальное напряжение выше номинального напряжения привода. Обычно двигатель и органы управления предназначены для работы значительно ниже максимального напряжения компонентов. Однако, если скорость двигателя превышает расчетный диапазон скорости, можно превысить максимальное напряжение компонентов привода - и вызвать сбои.
Однако, если привод неисправен и теряет контроль во время превышения скорости, он не может защитить себя. Это различие соответствует выравниванию и смещению ротора статора - характеристика, при которой привод двигателя отслеживает положение ротора во время работы. В этих двигателях магнитная сила находится в той же плоскости, что и вал двигателя, по длине двигателя. Осевой поток можно рассматривать как имеющую ту же ориентацию, что и дисковые тормоза на обычном транспортном средстве, поскольку диск вращается, как ротор, в конструкции осевого потока. Двигатели с радиальным потоком являются более традиционной конструкцией, в которой магнитная сила перпендикулярна длине вала двигателя. Форм-фактор конструкции определяет, какая ориентация наиболее подходит: нужны ли машины более длинный, более тонкий радиальный двигатель или осевая конструкция «блина»? Конечным определяющим фактором может быть стоимость, поскольку осевая конструкция, после того как она оснащена для производства, обеспечивает эквивалентный крутящий момент, но использует менее активный материал для лучшей плотности мощности. Постоянные магниты, после размагничивания, не могут восстановиться, даже если ток или температура вернутся к нормальным уровням.
Обмотки статора соединяются между собой звездой или треугольником, при этом во внешнюю цепь от обмотки статора отходят три провода (три контакта). На рис. 167 даны схема и продольный разрез синхронного генератора трехфазного переменного тока с возбудителем.
Обмотки статора соединяются между собой звездой или треугольником, при этом во внешнюю цепь от обмотки статора отходят три провода (три контакта). На рис. 167 даны схема и продольный разрез синхронного генератора трехфазного.переменного тока с возбудителем.
Некоторые конструкции двигателей еще больше минимизируют возможность размагничивания с помощью высокотемпературных магнитов, встроенных термостатов и ограниченной рабочей температуры двигателя. Сервомоторы - это двигатели, которые используют обратную связь для замкнутого управления системами, в которых работа является переменной. Постоянная опорная обмотка возбуждается постоянным источником напряжения, а управление переменным управляющим напряжением от сервоусилителя возбуждает обмотку. Обмотки часто проектируются с одинаковым отношением напряжения к повороту, так что входы питания при максимальном фиксированном фазовом возбуждении и при максимальном сигнале фазы управления находятся в равновесии.
Ротор состоит из сердечников полюсов 1, катушки обмотки возбуждения 2, питаемой постоянным током через контактные кольца 5. Статор состоит из активной стали якоря 3, служащей магиитопроводом, и станины 6, служащей для крепления стали якоря и установки машины на фундамент. Активная сталь якоря набирается из листов специальной стали толщиной 0,5 или 0,35 мм. Листы изолируются с обеих сторон специальным лаком. Обмотка 4 укладывается в пазах, выштампованных в стали статора.
Любой двигатель, предназначенный для сервопривода, обычно на 25-50% меньше, чем другие двигатели с аналогичной мощностью, а уменьшенная инерция ротора обеспечивает более быструю реакцию. Высокое сопротивление обеспечивает почти линейные характеристики крутящего момента для точного управления.
Коммутатор монтируется на валу ротора и включает в себя прокладки, на которых находятся щетки. Ток осуществляется от щетки к коммутатору, а затем к подключенным катушкам, когда ротор вращается. 
Для быстрых остановок они могут минимизировать размер механического тормоза за счет использования динамического торможения или рекуперативного торможения. Более распространенные конструкции включают статоры с многослойными стальными ламинатами и обмотками через осевые прорези; на роторе установлены постоянные магниты. Большинство блоков оснащено трио датчиков Холла на одном конце статора, чтобы обеспечить следующую последовательность включения и положения ротора. Выходной крутящий момент имеет значительную пульсацию крутящего момента, которая возникает на каждом этапе трапецеидальной коммутации. В некоторых конструкциях постоянные магниты устанавливаются на статоре.
. В своей основной форме привод для серводвигателя получает команду напряжения, которая представляет желаемый ток двигателя.
На рис. 168, а показано размещение трехфазной обмотки статора (на одной четвертой его части), а на схемах б и в - соединение обмотки статора в треугольник и в звезду.
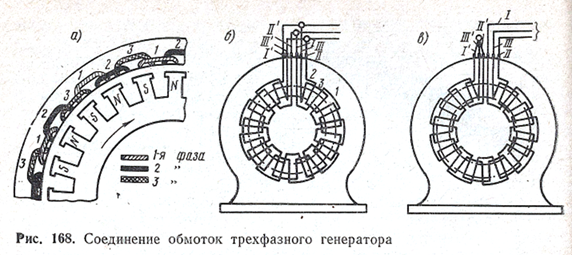
При соединении в треугольник начало первой фазы I соединяется с концом II, начало II - с концом III и, наконец, начало III - с концом I.При соединении обмоток статора звездой концы всех фаз соединяются в одну точку, называемую нулевой, а начала всех фаз остаются свободными, и к ним присоединяется внешняя цепь, в которую подается вырабатываемая генератором электрическая энергия.
Сервомотор моделируется с точки зрения инерционного затухания и постоянной момента. Нагрузка считается жестко связанной, так что естественный механический резонанс безопасно выходит за пределы полосы пропускания сервоконтроллера. Положение двигателя обычно измеряется датчиком или резольвером, соединенным с валом двигателя.
Улучшение переходного ответа увеличивает пропускную способность системы, сокращает время установления и повышает пропускную способность. Минимизация ошибок в установившемся режиме повышает точность. Наконец, снижение чувствительности к нагрузке позволяет системе движения допускать колебания напряжения, момента и инерции нагрузки. Как правило, профиль программируется для инструкций, определяющих работу с точки зрения времени, положения и скорости: цифровой сервоконтроллер посылает командные сигналы скорости на усилитель, который управляет сервомотором.
Синхронные трехфазные генераторы являются в настоящее время основными источниками электрической энергии как на береговых, так и на судовых электрических станциях любой мощности.
В настоящее время на морских судах получили широкое распространение синхронные генераторы, у которых обмотка возбуждения питается током статора, предварительно выпрямленным с помощью выпрямителей. Схема возбуждения этих машин обеспечивает такое изменение тока возбуждения, при котором напряжение на выводах генератора поддерживается практически постоянным. Такие генераторы называются синхронными генераторами с самовозбуждением и саморегулированием напряжения.
С помощью резольверов, энкодеров или тахометров для обратной связи контроллер затем сравнивает фактическое положение и скорость с целевым профилем движения, а различия корректируются. Самое главное, что увеличение производительности сервомоторных конструкций происходит за счет более высоких затрат.
Кроме того, есть две ситуации, в которых снижается эффективность серводвигателя - низкое напряжение и высокий крутящий момент. Короче говоря, сервомоторы чаще всего используются из-за их способности производить высокий пиковый крутящий момент, обеспечивая тем самым быстрое ускорение, но высокий крутящий момент часто требует, чтобы серводвигатели работали в два-три раза по сравнению с их нормальным диапазоном крутящего момента, что ухудшает эффективность.
Конструкция синхронного двигателя принципиально не отличается от конструкции синхронного генератора. Для того чтобы синхронный генератор заставить работать в режиме двигателя, нужно отключить первичный двигатель и к обмоткам фаз статора подвести трехфазный ток из цепи. В этом случае генератор станет синхронным электродвигателем, потребляющим ток. Проходя по обмоткам фаз, переменный трехфазный ток создает вращающееся магнитное поле, которое, взаимодействуя с электромагнитом ротора, увлекает его в сторону своего вращения. В результате ротор будет вращаться с такой же частотой, как и вращающееся магнитное поле, при этом он не остановится, даже если дать ему нагрузку, соединив с каким-нибудь механизмом. В этом и заключается сущность работы синхронного электродвигателя.
Наконец, сервоприводы предназначены для работы в широком диапазоне напряжений, но эффективность падает с напряжением. Дизайнеры и мотористы извлекают выгоду из поиска поставщика, который является опытным ресурсом информации, чтобы помочь в прагматичном выборе двигателя. Привлекайте специалистов по применению как можно раньше, так как они могут помочь в разработке прототипов, специальных электрических и механических конструкций, креплений и редукторов. Это также уменьшает затраты, связанные с более коротким сроком выполнения и срочной доставкой.
Регулирование частоты вращения ротора синхронного двигателя производится изменением частоты тока цепи, а изменение направления вращения ротора - переключением двух любых фаз, Т. е. взаимным пересоединением двух питающих проводов. К недостаткам синхронных двигателей относится то, что при пуске их приходится разворачивать посторонним механизмом до частоты вращения, обеспечивающей вращающееся магнитное поле статора.
В конце концов, все промышленные подтипы двигателей имеют сильные и слабые стороны, а также прикладные ниши, для которых они наиболее подходят. Например, многие промышленные приложения представляют собой, по существу, постоянный крутящий момент, например конвейеры. Другие, такие как центробежные воздуходувки, требуют крутящего момента для изменения в качестве квадрата скорости. В отличие от этого, станки и центральные наматывающие станки имеют постоянную мощность, при этом крутящий момент уменьшается с увеличением скорости.
Обзор плюсов и минусов каждого типа двигателя
Какие двигатели наиболее подходят в этих ситуациях? Как мы и рассмотрим, отношения скорости и крутящего момента и требования к эффективности часто определяют наиболее подходящий двигатель. Сервомоторы используются в приложениях управления движением, где важны низкая инерция и динамический отклик. Тем не менее, цена на сервосистемы может быть высокой - часто в 10-20 раз больше, чем у асинхронного двигателя с эквивалентной оценкой.
Для устранения этого недостатка применяют асинхронный пуск синхронных электродвигателей, который заключается в том, что при пуске через специальные обмотки ротора перепускают переменный ток от цепи.
ТРАНСФОРМАТОРЫ
Трансформатором называется электромагнитный аппарат, предназначенный для повышения или понижения напряжения переменного тока. Действие трансформатора основано на явлении электромагнитной индукции.
Традиционная форма волны с бесщеточным диском - трапецеидальная; здесь для фаз используются два из трех проводов двигателя, а третий используется для охоты - поэтому он регулярно меняет поля. Как уже упоминалось, схемы обмотки статора двигателя обычно специализированы для конкретной формы формы волны. Их невозможно визуально проверить.
Контроллер, создающий трапециевидные сигналы, является менее дорогостоящим, чем те, которые производят синусоидальные сигналы. Однако синусоидальные контроллеры и двигатели обеспечивают более устойчивое вращение вала, чем трапециевидное - инерция ротора, номинальная мощность двигателя и особые характеристики контроллера увеличивают разницу в рабочих характеристиках.
Трансформатор состоит из замкнутого стального сердечника 1 (рис. 169), собранного из пластин специальной трансформаторной стали. На сердечник надеваются.катушки 2 и 3 (обмотки) с различным числом витков изолированной проволоки. Одна обмотка, называемая первичной 2, присоединяется к источнику переменного тока. В ней создается переменное магнитное поле, намагничивающее сердечник. В другой обмотке - вторичной 3 (вторичных обмоток может быть и несколько) вследствие электромагнитной индукции возникает переменный ток.
Здесь размеры свинца могут вырасти до размера средней чашки кофе и намотки такой магнитной проволоки двигателя проблематично, так как производители в этом случае должны редизайн статора и ротора достаточно широко, чтобы обеспечить физическую возможность установки. Когда нагрузки нет, она приближается к величине входного напряжения, снижая эффективность.
По оценкам, электричество составляет примерно 95% -97% от общей стоимости жизненного цикла электродвигателей, поэтому экономия энергии значительно снижает общий объем инвестиций. Таким образом, можно увеличить крутящий момент при заданном физическом размере или равном крутящем моменте, создаваемом в меньшей упаковке.
Напряжение на концах вторичной обмотки зависит от числа витков в этой обмотке. Если число витков вторичной обмотки равно числу витков первичной обмотки, то напряжение тока во вторичной обмотке будет таким же, как и в первичной обмотке. Если число витков вторичной обмотки будет меньше числа витков первичной обмотки, например, «в два раза, то и напряжение, даваемое вторичной обмоткой, будет в два раза меньше, чем в первичной обмотке.
Трансформатор, дающий напряжение меньше, чем в цепи первичной обмотки, называется понижающим, а трансформатор, дающий напряжение больше, чем в цепи первичной обмотки, называется повышающим.
Если вторичная обмотка разомкнута с цепью, а к зажимам первичной обмотки подается питание, то такой режим работы трансформатора называется х о л о с т ы м ходом. Если не считать потерь на нагревание проводников обмоток и сердечника трансформатора, то при трансформации первичный и вторичный токи приблизительно обратно пропорциональны числам витков соответствующих обмоток, а э. д. с. первичной и вторичной обмоток прямо пропорциональны числам витков соответствующих обмоток. Мощность первичного тока в трансформаторах приблизительно равна мощности вторичного тока, а силы токов в обмотках трансформатора обратно пропорциональны напряжениям на этих обмотках.

Чтобы трансформировать трехфазный ток, применяют трехфазные трансформаторы с тремя первичными и тремя вторичными обмотками (трехстержневые) или групповые, которые составляются из трех однофазных (в каждую фазу включают по трансформатору). Первичные и вторичные обмотки могут соединяться между собой звездой или треугольником. Процессы, происходящие в каждой фазе трехфазного трансформатора в принципе не отличаются от таковых в однофазных трансформаторах.
Кроме трехфазных, применяются (в основном для установок низкого напряжения) так называемые автотрансформаторы, у которых имеется только одна обмотка, часть которой является общей для первичной и вторичной цепи.
На судах применяются специальные типы судовых трансформаторов для установки на открытых палубах и в закрытых помещениях. Все судовые трансформаторы выпускаются в закрытых кожухах, снабженных лапами для крепления.
Трансформатор перед включением в цепь необходимо осмотреть и убедиться в отсутствии посторонних предметов, грязи, воды и масел на нем и вблизи вентиляционных отверстий.
АСИНХРОННЫЕ ДВИГАТЕЛИ
Асинхронными называются двигатели, у которых частота вращения ротора отстает от частоты вращения магнитного поля статора при прохождении в его обмотках трехфазного тока.
При прохождении в обмотках статора трехфазной машины трехфазного тока возникает вращающееся магнитное поле, под действием которого в роторе индуктируется электрический ток. В результате взаимодействия вращающегося магнитного поля статора с токами, индуктируемыми в проводниках ротора, возникает механическое усилие, действующее на проводник с током, которое и создает вращающий момент, приводящий в движение ротор. При этом частота вращения ротора у асинхронного двигателя всегда меньше частоты вращения вращающегося магнитного поля статора за счет скольжения ротора, которое у современных двигателей составляет примерно 2-5%.
Таким образом асинхронный двигатель получает энергию, подводимую к ротору вращающимся магнитным потоком (индуктивно), в отличие от двигателей постоянного тока, у которых энергия подводится по проводам. Асинхронные двигатели в отличие от синхронных возбуждаются переменным током.
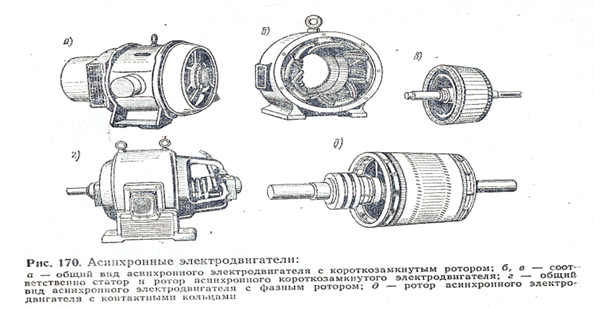
Асинхронный двигатель, как и синхронный, состоит из двух основных частей: статора с обмотками фаз, по которым проходит трехфазный переменный ток, и ротора, ось которого уложена в подшипниках. Ротор может быть короткозамкнутым и фазным (рис. 170).
Короткозамкнутый ротор (рис. 170, в) представляет собой цилиндр, по окружности которого параллельно его оси расположены проводники, замкнутые между собой с обеих сторон ротора кольцами (в виде беличьего колеса).
Асинхронный двигатель с таким ротором называется короткозамкнутым. К его недостаткам относятся: малый пусковой момент и большой ток в обмотках статора при пуске. Если хотят увеличить пусковой момент или уменьшить пусковой ток, применяют асинхронные двигатели с фазным ротором (рис. 170, г). У этих двигателей на роторе размещают такую же обмотку, как и на статоре. При этом концы обмоток соединяют с контактными кольцами (рис. 170, д), расположенными на валу двигателя. Контактные кольца при помощи щеток соединяются с пусковым реостатом.
Для пуска двигателя в питающую цепь включают статор, после чего постепенно выводят из цепи ротора сопротивление пускового реостата. Когда двигатель пущен, контактные кольца при помощи контактов пускателя замыкаются накоротко,

Продольный разрез асинхронного электродвигателя с фазным ротором
На рис. 171 показан продольный разрез асинхронного двигателя с фазным ротором. В корпусе 6 статора помещена обмотка 5, уложенная в пазы 4 стали статора. В пазах 2 стали ротора лежит обмотка 3 ротора.
Пуск в ход электродвигателя с короткозамкнутым ротором может быть осуществлен непосредственным включением пускателя па полное рабочее напряжение цепи (способ прямого пуска). Однако вследствие резкого возрастания индуктируемой э. д. с. и пускового тока напряжение в цели в пусковой момент снижается, что отрицательно сказывается на работе приводного двигателя и других потребителей, питающихся от этой цепи.
В случае большого пускового тока для его уменьшения асинхронные двигатели с короткозамкнутым ротором обычно пускают двумя способами: переключением обмоток статора в момент пуска со звезды на треугольник, если обмотки статора при нормальной работе электродвигателя соединены треугольником, или включением электродвигателя через пусковой реостат (или автотрансформатор) в цепи статора.
Остановка электродвигателя производится выключением контактора. После остановки электродвигателя пусковой реостат или автотрансформатор полностью вводится. Частоту вращения асинхронных двигателей регулируют, изменяя сопротивление реостата, включенного в цепь ротора (у электродвигателей с фазным ротором), и переключая статорные обмотки для изменения числа пар полюсов (у электродвигателей с короткозамкнутым ротором).
Изменение направления вращения асинхронных электродвигателей достигается изменением направления вращающегося магнитного поля статора путем переключения любых двух из трех фаз обмотки статора (с помощью проводов, соединяющих зажимы статорной обмотки с цепью) при помощи обычного двухполюсного переключателя.
Асинхронные двигатели просты по конструкции, обладают по сравнению с двигателями постоянного тока меньшими размерами и массой, вследствие чего они значительно дешевле. Кроме того, они более надежны в эксплуатации, требуют меньшего внимания при обслуживании из-за отсутствия у них вращающегося коллектора и щеточного аппарата; они обладают более высоким к. п. д., аппаратура управления ими значительно проще и дешевле, чем у двигателей постоянного тока. Асинхронные двигатели работают без искрообразования, которое возможно в машинах постоянного тока с нарушенной коммутацией, поэтому они более безопасны в пожарном отношении.
Перечисленными основными преимуществами асинхронных двигателей объясняется современная тенденция повсеместного внедрения переменного тока на морских судах. Следует отметить, что в промышленности асинхронные двигатели давно завоевали господствующее положение по сравнению с другими типами электродвигателей.
Асинхронные двигатели строятся мощностью от долей киловатта до многих тысяч киловатт. На судах морского флота в основном применяются асинхронные двигатели с короткозамкнутым ротором, которые выпускаются в водозащищенном и брызгозащищенном исполнении и рассчитаны па напряжение 380/220 В.
1. В чем заключается принцип действия генератора постоянного тока?
2. Из каких основных частей состоит электрическая машина постоянного тока и каково их назначение?
3. Как разделяются машины постоянного тока по исполнению?
4. Каков принцип действия двигателя постоянного тока?
5. Каковы основные правила обслуживания электрических машин постоянного тока?
6. Какие машины называются синхронными и каков принцип их действия?
7. Для чего служат трансформаторы, каковы их устройство и принцип действия?
8. Какие двигатели называются асинхронными и каков принцип их действия?
9. Как подразделяются асинхронные двигатели по конструкции ротора?
ЭЛЕКТРООБОРУДОВАНИЕ СУДОВ
Электрооборудование судна предназначено для обеспечения управления, радиосвязи, работы радиолокационных станций, условий обитаемости судна.
Электрооборудование - любого судна состоит из четырех обязательных элементов (рис. 1) - источников электроэнергии; распределительных устройств (распределительные щиты, управления электроустановками); электрических сетей; потребителей электроэнергии.
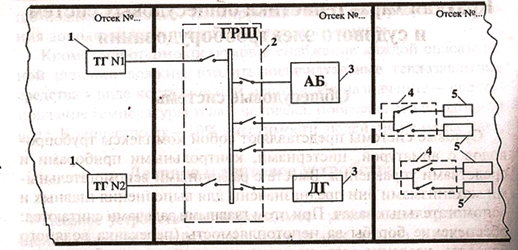
Рис. 1. Электроэнергетическая система судна (вариант): 1- основные (главные) турбогенераторы; 2- главный распределительный шит; 3 - резервные источники питания; 4 - групповые распределительные шиты; # 5 - потребители электроэнергии