Двигатель постоянного тока с независимым параллельным возбуждением. Поведение электромотора при изменении нагрузок. Задание и методика выполнения работы
Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
с независимым возбуждением : обмотка возбуждения питается от постороннего источника постоянного тока (возбудителя или выпрямителя) ;
с параллельным возбуждением : обмотка возбуждения подключена параллельно обмотке якоря;
Контроллеры подключаются к входу драйверов и задают тип напряжения и тока, например, импульсы или постоянное напряжение. Большинство контроллеров предназначены для некоторых типов электродвигателей, но есть и два типа. В материале разъясняются принципы работы контроллеров и драйверов для основных типов электродвигателей и даются их типичные представители.
Двигатели постоянного коллектора. Статор и ротор представляют собой катушки, действующие как электромагниты, а вращательное движение обеспечивается взаимодействием их полей. Ток ротора течет через щеточки коллектора, что является основным недостатком. В случае двигателей с внешним возбуждением статор и ротор питаются от отдельных постоянных напряжений, а их крутящий момент и скорости регулируются в широком диапазоне током статора и напряжением ротора. Их управление обычно требует обратной связи. В случае легкой регулировки скорости используются серийные электродвигатели, название которых происходит от последовательного соединения обмоток статора и ротора с одним напряжением питания.
с последовательным возбуждением : обмотка возбуждения включена последовательно с обмоткой якоря;
со смешанным возбуждением : он имеет две обмотки возбуждения, одна подключена параллельно обмотке якоря, а другая - последовательно с ней.
Все эти электродвигатели имеют одинаковое устройство и отличаются лишь выполнением обмотки возбуждения. Обмотки возбуждения указанных электродвигателей выполняют так же, как у соответствующих генераторов.
Двигатели коллектора имеют широкое промышленное применение для всей мощности, особенно при регулировке оборотов и крутящего момента. Дополнительные преимущества - низкая цена и небольшие размеры. Блок-схема типичного драйвера показана на рис. 1, а его основные параметры приведены в таблице. Подключение ключей - это схема моста.
Постоянные неэлектрические двигатели. Ротор является постоянным магнитом и не требует кистей, что является одним из их больших преимуществ. Статор представляет собой катушку, которая посредством надлежащего управления обеспечивает вращающееся магнитное поле для захвата ротора вместе с ним. Самый простой способ сделать это - изменить направление тока статора на каждом повороте так, чтобы его поле всегда привлекало ближайший полюс ротора. Имеются однофазные и трехфазные двигатели, последние имеют значительно больший постоянный крутящий момент.
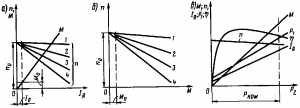
Электродвигатель с независимым возбуждением . В этом электродвигателе (рис. 125, а) обмотка якоря подключена к основному источнику постоянного тока (сети постоянного тока, генератору или выпрямителю) с напряжением U, а обмотка возбуждения - к вспомогательному источнику в напряжением U B . В цепь обмотки возбуждения включен регулировочный реостат R рв, а в цепь обмотки якоря - пусковой реостат R П. Регулировочный реостат служит для регулирования частоты вращения якоря двигателя, а пусковой - для ограничения тока в обмотке якоря при пуске. Характерной особенностью электродвигателя является то, что его ток возбуждения I в не зависит от тока I я в обмотке якоря (тока нагрузки). Поэтому, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя Ф не зависит от нагрузки. При этом условии согласно формулам (63′) и (65) получим, что зависимости электромагнитного момента М и частоты вращения п от тока I я будут линейными (рис. 126, а). Следовательно, линейной будет и механическая характеристика двигателя - зависимость п (М) (рис. 126,б).
Нескользящие двигатели обеспечивают более высокую скорость от коллекторов, поэтому они расширяются. Принцип управления показан на фиг. Это регулирует частоту вращения двигателя. Поэтапные электродвигатели. Это двигатели постоянного тока, по окружности которых установлены роторы постоянных магнитов с чередующимися полюсами. Статор имеет две поперечные обмотки, самый простой случай - в любой момент времени, когда протекает только один ток.
Он притягивает ближайший полюс ротора, который вращается против обмотки и остается неподвижным. Через него протекает ток, даже если ротор не перемещается и создает фиксирующий момент для фиксации положения ротора. Даже когда ток прекращается через обмотку, сила притяжения между постоянными магнитами и противоположными наконечниками статора остается. Он называется остаточным моментом. Он в десять раз меньше, чем фиксатор, но все же не позволяет изменять положение ротора с небольшой внешней силой удара на него.
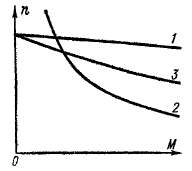
При отсутствии в цепи якоря реостата с сопротивлением R П скоростная и механическая характеристики будут жесткими, т. е. с малым углом наклона к горизонтальной оси, так как падение напряжения I я? R я в обмотках машины, включенных в цепь якоря, при номинальной нагрузке составляет лишь 3-5 % от U HOM . Эти характеристики (прямые 1 на рис. 126, а и б) называются естественными . При включении в цепь якоря реостата с сопротивлением R П угол наклона этих характеристик возрастает, вследствие чего можно получить семейство реостатных характеристик 2, 3 и 4, соответствующих различным
Чтобы повернуть ротор на следующий шаг, через другую катушку пропускается ток, который также привлекает полюс ротора. Таким образом, через последовательные импульсы времени обмоток обеспечивается ступенчатое движение ротора. Поскольку число полюсов больше, чем меньше угол поворота, соответствующий одному шагу.
В зависимости от того, как сделаны обмотки статора, есть два основных типа шаговых двигателей, которые отличаются тем, как они работают. В биполярном, также называемом двухфазным, ток может протекать в обоих направлениях через каждую катушку. Это обеспечивается драйверами и проиллюстрировано на фиг.
значениям R п1 , R п2 и R п3 . Чем больше сопротивление R п, тем больший угол наклона имеет реостатная характеристика, т. е. тем она мягче.
Регулировочный реостат R рв позволяет изменять ток возбуждения двигателя I в и его магнитный поток Ф. Как следует из формулы (65), при этом будет изменяться и частота вращения п. В цепь обмотки возбуждения никаких выключателей и предохранителей не устанавливают, так как при разрыве этой цепи резко уменьшается магнитный поток электродвигателя (в нем остается лишь поток от остаточного магнетизма) и возникает аварийный режим. Если электродвигатель работает при холостом ходе или небольшой нагрузке на валу, то частота вращения, как следует из формулы (65), резко возрастает (двигатель идет вразнос). При этом сильно увеличивается ток в обмотке якоря I я [см. формулу (66)] и может возникнуть круговой огонь. Во избежание этого защита должна отключить электродвигатель от источника питания. Резкое увеличение частоты вращения при обрыве цепи обмотки возбуждения объясняется тем, что в этом случае резко уменьшаются магнитный поток Ф (до значения потока Ф ост от остаточного магнетизма) и э. д. с. Е и возрастает ток I я. А так как приложенное напряжение U остается неизменным, то частота вращения п будет увеличиваться до тех пор, пока э. д. с. Е не достигнет значения, приблизительно равного U (что необходимо для равновесного состояния электрической цепи якоря, при котором E=U - I я? R я).
Катушки однополярных шаговых двигателей, также известные как четырехфазные двигатели, имеют среднюю клемму, а их мощность подается однополюсными импульсами тока. Схемы рис. 5 и 6 показана работа шаговых двигателей в режиме обратного напряжения. Драйверы самые простые, и его применение в основном предназначено для двигателей с низким оборотом. Причиной этого является то, что при высоких скоростях напряжение должно подаваться на короткое время на каждую катушку. А так как ток через обмотку задерживается по отношению к его напряжению, то получается, что есть ток только в течение части продолжительности напряжения.
При нагрузке на валу, близкой к номинальной, электродвигатель в случае разрыва цепи возбуждения остановится, так как электромагнитный момент, который может развить двигатель при значительном уменьшении магнитного потока, уменьшается [см. формулу (63")] и станет меньше нагрузочного момента на валу. В этом случае так же резко увеличивается ток I я [так как в формуле (64) э. д. с. Е будет равна нулю], и машина должна быть отключена от источника питания.
Это означает уменьшение крутящего момента. По этой причине для высоких скоростей режим неограниченного тока является предпочтительным независимо от более сложной схемы драйвера. Последней особенностью управления шаговым двигателем является изменение направления движения, реализуемого контроллером управления. Существует два основных способа сделать это. Второй способ также требует двух выходов от контроллера, но импульсы от одного из них обеспечивают вращение по часовой стрелке, а другие - в противоположном направлении.
Трудно и дорого сделать многоступенчатые двигатели, увеличив количество полюсов. Реализация большого количества шагов с помощью небольших полюсов достигается с помощью микрополоскового управления. Также покажите внешние элементы и обмотки двигателя. Последние соединены в соответствии с фиг. 6, что означает, что драйвер предназначен для однополюсных двигателей.
Следует отметить, что частота вращения n 0 соответствует идеальному холостому ходу, когда двигатель не потребляет из сети электрической энергии и его электромагнитный момент равен нулю. В реальных условиях в режиме холостого хода двигатель потребляет из сети ток холостого хода I 0 , необходимый для компенсации внутренних потерь мощности (см. § 25), и развивает некоторый момент М 0 , требуемый для преодоления сил трения в машине. Поэтому в действительности частота вращения при холостом ходе меньше nо.
В таблице. 3 приведены основные параметры ИС для управления шаговым двигателем. Асинхронные двигатели переменного тока. Это один из основных типов, также известный как асинхронные двигатели переменного тока. Они одно - и трехфазные, причем каждая фаза соединена с парой полюсов на статоре. Ротор не имеет источника питания, что означает отсутствие коллектора и, следовательно, надежную работу. Он содержит алюминиевые полосы вдоль своей длины, которые образуют связную короткую обмотку. Переменное напряжение статора создает в нем вращающееся магнитное поле, которое вызывает напряжение в обмотке ротора.
Зависимость частоты вращения n и электромагнитного момента М от мощности Р 2 (рис. 126, в) на валу двигателя, как следует из рассмотренных соотношений, является линейной. Зависимости тока обмотки якоря I я и мощности Р 1 от Р 2 также практически линейны. Ток I я и мощность Р 1 при Р 2 = 0 представляют собой ток холостого хода I 0 и мощность Р 0 , потребляемую при холостом ходе. Кривая к. п. д. имеет характер, общий для всех электрических машин (см. § 37).
Он протекает через него, и его магнитное поле взаимодействует с его магнитным полем. Результатом является увлечение ротора из поля статора и его вращение. Типичные ИС для управления асинхронными двигателями приведены в таблице. Другая категория - специализированные микроконтроллеры. В принципе, они делятся на две большие группы - универсальные и предназначены для привода электродвигателей. Универсальные предназначены для широкого спектра применений и, в частности, для электродвигателей.
Эти ИС имеют возможность автоматического отключения двигателя, когда его ток превышает установленное значение.
Он протекает через него, и его магнитное поле взаимодействует с его магнитным полем. Результатом является увлечение ротора из поля статора и его вращение. Типичные ИС для управления асинхронными двигателями приведены в таблице. Другая категория - специализированные микроконтроллеры. В принципе, они делятся на две большие группы - универсальные и предназначены для привода электродвигателей. Универсальные предназначены для широкого спектра применений и, в частности, для электродвигателей.
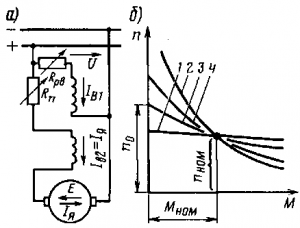
Электродвигатель с параллельным возбуждением. В этом электродвигателе (см. рис. 125, б) обмотки возбуждения и якоря питаются от одного и того же источника электрической энергии с напряжением U. В цепь обмотки возбуждения включен регулировочный реостат R рв, а в цепь обмотки якоря - пусковой реостат R п. В рассматриваемом электродвигателе имеет место, по существу, раздельное питание цепей обмоток якоря и возбуждения, вследствие чего ток возбуждения I в не зависит от тока обмотки якоря I в. Поэтому электродвигатель с параллельным возбуждением будет иметь такие же характеристики, как и двигатель с независимым возбуждением. Однако двигатель с параллельным возбуждением работает нормально только при питании от источника постоянного тока с неизменным напряжением.
При питании электродвигателя от источника с изменяющимся напряжением (генератор или управляемый выпрямитель) уменьшение питающего напряжения U вызывает соответствующее уменьшение тока возбуждения I в и магнитного потока Ф, что приводит к увеличению тока обмотки якоря I я [см. формулу (66) ]. Это ограничивает возможность регулирования частоты вращения якоря путем изменения питающего напряжения U. Поэтому электродвигатели, предназначенные для питания от генератора или управляемого выпрямителя, должны иметь независимое возбуждение.
Электродвигатель с последовательным возбуждением. Для ограничения тока при пуске в цепь обмотки якоря включен пусковой реостат R п (рис. 127, а), а для регулирования частоты вращения

параллельно обмотке возбуждения может быть включен регулировочный реостат R рв. Характерной особенностью этого электродвигателя является то, что его ток возбуждения I в равен или пропорционален (при включении реостата R рв) току обмотки якоря I я, поэтому магнитный поток Ф зависит от нагрузки двигателя (рис. 127,б).
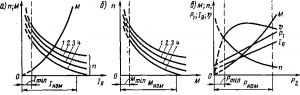
При токе обмотки якоря I я, меньшем (0,8-0,9) номинального тока I ном, магнитная система машины не насыщена и можно считать, что магнитный поток Ф изменяется прямо пропорционально току I я. Поэтому скоростная характеристика электродвигателя будет мягкая - с увеличением тока I я частота вращения n будет резко уменьшаться (рис. 128, а). Уменьшение частоты вращения n, как следует из формулы (65), происходит из-за увеличения падения напряжения I я?R я во внутреннем сопротивлении? R я цепи обмотки якоря, а также из-за увеличения магнитного потока Ф.
Электромагнитный момент М при увеличении тока I я будет резко возрастать, так как в этом случае увеличивается и магнитный поток Ф, т. е. момент М будет пропорционален току I я. Поэтому при токе I я, меньшем (0,8-0,9) I ном, скоростная характеристика имеет форму гиперболы, а моментная - параболы.
При токах I я > I ном зависимости М и п от I я линейны, так как в этом режиме магнитная цепь будет насыщена и магнитный поток Ф при изменении тока I я меняться не будет.
Механическая характеристика, т. е. зависимость п от М (рис. 128,6), может быть построена на основании зависимостей n и М от I я. Кроме естественной характеристики 1, можно путем включения в цепь обмотки якоря реостата с сопротивлением R п получить семейство реостатных характеристик 2, 3 и 4. Эти характеристики соответствуют различным значениям R п1 , R п2 и R п3 ; при этом чем больше R п, тем ниже располагается характеристика. Механическая характеристика рассматриваемого двигателя мягкая и имеет гиперболический характер. При малых нагрузках магнитный поток Ф сильно уменьшается, частота вращения n резко возрастает и может превысить максимально допустимое значение (двигатель идет вразнос). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода и при небольшой нагрузке (различные станки, транспортеры и пр.). Обычно минимально допустимая нагрузка для двигателей большой и средней мощности составляет (0,2-0,25) I ном. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой); применение ременной передачи или фрикционной муфты недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют, особенно там, где имеют место изменения нагрузочного момента в широких пределах и тяжелые условия пуска: во всех тяговых приводах (электровозы, тепловозы, электропоезда, электрокары, электропогрузчики и пр.), а также в приводах грузоподъемных механизмов (краны, лифты и пр.). Объясняется это тем, что при мягкой характеристике увеличение нагрузочного момента приводит к меньшему возрастаний тока и потребляемой мощности, чем у двигателей с независимым и параллельным возбуждением; поэтому двигатели с последовательным возбуждением лучше переносят перегрузки. Кроме того, эти двигатели имеют большой пусковой момент, чем двигатели с параллельным и независимым возбуждением, так как при увеличении тока обмотки якоря при пуске соответственно увеличивается и магнитный поток.
Если принять, например, что кратковременный пусковой ток может в 2 раза превышать номинальный рабочий ток машины, и пренебречь влиянием насыщения, реакцией якоря и падением напряжения в цепи его обмотки, то в двигателе с последовательным возбуждением пусковой момент будет в 4 раза больше номинального (в 2 раза увеличиваются и ток, и магнитный поток), а в двигателях с независимым и параллельным возбуждением - только в 2 раза больше. В действительности из-за насыщения магнитной цепи магнитный поток не увеличивается пропорционально току, но все же пусковой момент двигателя с последовательным возбуждением при прочих равных условиях будет значительно больше пускового момента такого же двигателя с независимым или параллельным возбуждением.
Зависимости п и М от мощности Р 2 на валу электродвигателя (рис. 128, в), как следует из рассмотренных выше положений, являются нелинейными; зависимости P 1 , I я и? от Р 2 имеют такую же форму, как и у двигателей с параллельным возбуждением.
Электродвигатель со смешанным возбуждением. В этом электродвигателе (рис. 129, а) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения - параллельной (или независимой) и последовательной, по которым проходят токи возбуждения I в1 и I в2 = I я. Поэтому
Ф = Ф посл + Ф пар
Ф посл - магнитный поток последовательной обмотки, зависящий от тока I я;
Ф пар - магнитный поток параллельной обмотки, который не зависит от нагрузки (определяется током возбуждения I в1).
Механическая характеристика электродвигателя со смешанным возбуждением (рис. 129,б) располагается между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В зависимости от соотношения магнитодвижущих сил параллельной и последовательной обмоток при номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (кривая 3 при малой м. д. с. последовательной обмотки) или к характеристике 2
(кривая 4 при малой м. д. с. параллельной обмотки). Достоинством двигателя со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, когда Ф посл = 0. В этом режиме частота вращения его якоря определяется магнитным потоком Ф пар и имеет ограниченное значение (двигатель не идет вразнос).
Глава десятая ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
§ 10-1. Общие сведения о двигателях постоянного тока
Двигатели постоянного тока находят широкое применение в промышленных, транспортных и других установках, где требуется широкое и плавное регулирование скорости вращения (прокатные станы, мощные металлорежущие станки, электрическая тяга на транспорте и т. д.).
По способу возбуждения двигатели постоянного тока подразделяются аналогично генераторам на двигатели независимого, параллельного, последовательного и смешанного возбуждения.
Схемы двигателей и генераторов с данным видом возбуждения одинаковы (рис. 9-1). В двигателях независимого возбуждения токи
якоря 1 а и нагрузки / равны: / = 1 а, в двигателях параллельного и смешанного возбуждения / = = / а + /,ив двигателях последовательного возбуждения / = 1 а = / в. С независимым.возбуждением от отдельного источника тока обычно выполняются мощные двигатели с целью более удобного и экономичного регулирования
Рис 10-1 Энергетическая диаграмма двигателя параллельного возбуждения
величины тока возбуждения. По своим свойствам двигатели независимого и параллельного возбуждения почти одинаковы, и поэтому первые ниже отдельно не рассматриваются.
Энергетическая диаграмма двигателя параллельного возбужден ния изображена на рис. 10-1. Первичная мощность Р х является электрической и потребляется из питающей сети. За счет этой мощности покрываются потери на возбуждение р в и электрические потери рд ла = P a Ra в цепи якоря, а оставшаяся часть составляет электромагнитную мощность якоря Р Эм = EJ a , которая превращается в механическую мощность Р мх. Потери магнитные р мг, добавочные р д и механические р„ х покрываются за счет механической мощности, а остальная часть этой мощности представляет собой, полезную механическую мощность Р 2 на валу.
Аналогичные энергетические диаграммы, иллюстрирующие преобразование энергии в двигателе, можно построить и для других типов двигателей.
Уравнение вращающих моментов. Электромагнитный момент двигателя
который является движущим и действует в сторону вращения, расходуется на уравновешивание тормозящих моментов: 1) момента М о, соответствующего потерям р ш, р д и р мх, покрываемым за счет механической мощности [см. равенство (9-6)]; 2) М в - момента нагрузки на валу, создаваемого рабочей машиной или механизмом; 3) М та - динамического момента [см. равенство (9-7)]. При этом
является статическим моментом сопротивления.
При установившемся режиме работы, когда п = const и поэтому
В дальнейшем индекс «эм» у М Эм будем опускать. Обычно М о мал по сравнению с М в, и поэтому приблизительно можно считать, что при установившемся режиме работы М э „ = М является полезным моментом на валу и уравновешивается моментом М в. Можно также величину М о включить в величину М в.
Укажем, что если выразить Р в кет, a Q - через число оборотов в минуту п н, то между Р, п м и М в кгс >м будет существовать зависимость
Уравнения напряжения и тока. В двигателях направление действия э. д. с. якоря Е а противоположно направлению тока якоря / о (см. § 1-1), и поэтому Е а называется также противоэлектродвижущей
силой якоря. Уравнение напряжения для цепи якоря двигателя можно записать следующим образом:
Здесь R a - полное сопротивление цепи якоря [см. равенство (9-15)]. В режиме двигателя всегда U >> Е а. Из равенства (10-4) следует, что
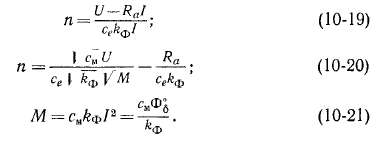
Скорость вращения и механические характеристики. Решая уравнение (10-4) совместно с (10-6) относительно п, находим уравнение скоростной характеристики п = f (I a) двигателя:
Определив отсюда значение 1 а и подставив его в (10-7), получим уравнение механической характеристики п = f (M) двигателя:
которое определяет зависимость скорости вращения двигателя от развиваемого момента вращения.
Вид механической характеристики п = f (М) или М = f (n) при U = const зависит от того, как с изменением нагрузки или М изменяется поток машины Фе, и различен для двигателей с различными способами возбуждения. Это же справедливо и для скоростных характеристик (см. § 10-4 - 10-6).

§ 10-2. Пуск двигателей постоянного тока
При пуске двигателя в ход -необходимо: 1) обеспечить надлежащую величину пускового момента и условия для достижения необходимой скорости вращения; 2) предотвратить возникновение чрезмерного пускового тока, опасного для двигателя.
Возможны три способа пуска двигателя в ход: 1) прямой пуск, когда цепь якоря приключается непосредственно к сети на ее полное напряжение; 2) пуск с помощью пускового реостата или пусковых сопротивлений, включаемых последовательно в цепь якоря; 3) пуск при пониженном напряжении цепи якоря.
При п = 0 также Е а = 0 и, согласно выражению (10-5),
L=U a /R a . (10-10)
В нормальных машинах R a ^. - 0,02 -н 0,10, и поэтому при прямом пуске с U = U u ток якоря недопустимо велик:
/ в = (50ч-10)/ н.
Вследствие этого прямой пуск применяется только для двигателей мощностью до нескольких сотен ватт, у которых R a относительно велико и поэтому при пуске l a sg (4 ■*- 6) / н, а процесс пуска длится не более 1-2 сек.
Самым распространенным является пуск с помощью пускового реостата или пусковых сопротивлений (рис. 10-2).
При этом вместо выражения (10-5) имеем
где R n - сопротивление пускового реостата, или пусковое сопротивление. Величина R n подбирается так, чтобы в начальный момент пуска было 1 а = (1,4 -г- 1,7) / н (в малых машинах до (2,0 4- 2,5) / н).
Рассмотрим подробнее пуск двигателя параллельного возбуждения с помощью реостата (рис. 10-2, а).
Перед пуском (t <; 0) подвижный контакт П пускового реостата стоит на холостом контакте 0 и цепь двигателя разомкнута. В начальный момент пуска (t = 0) подвижный контакт Я с помощью рукоятки переводится на контакт /, и через якорь пойдет ток / а, определяемый равенством (10-12). Цепь обмотки возбуждения ОВ подключается к неподвижной контактной дуге д, по которой скользит
контакт Я, чтобы во время пуска цепь возбуждения все время была под полным напряжением. Это необходимо для того, чтобы i B и Фв при пуске были максимальными и постоянными, так как при этом, согласно выражению (10-8), при данных значениях 1 а развивается
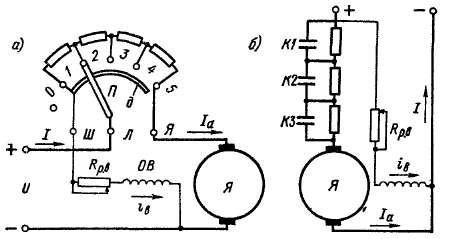
Рис 10-2 Схема пуска двигателя параллельного возбуждения с помощью пускового реостата (а) и пусковых сопротивлений (б)
наибольший момент М. С этой же целью регулировочный реостат возбуждения ставится при пуске в положение R p в = 0.
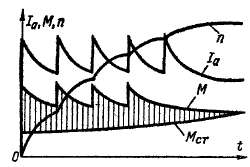
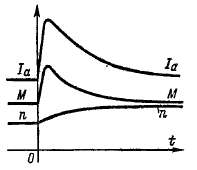
При положении контакта Я пускового реостата на контакте / (t = 0) возникают токи 1 а и i B , а также момент М, и если М > М ст, то двигатель придет во вращение и скорость п будет расти со значения п - 0 (рис. 10-3). При этом в якоре будет индуктироваться э. д. с. Ег^п и, согласно выражениям (10-1J) и (10-8), 1 а и М, а также скорость нарастания п будут уменьшаться. Изменение этих величин" при М ст = const происходит по экспоненциальному закону.
Когда 1 а достигнет значения Л» мин = (Ы -*■ 1,3) / н, контакт Я пускового реостата переведется на контакт 2. Вследствие уменьшения R n ток 1 а ввиду малой индуктивности цепи якоря почти мгновенно возрастет, М также увеличится, п будет расти быстрее и в результате увеличения Е а величины 1 а и М снова будут уменьшаться (рис. 10-3). Подобным же образом развивается процесс пуска при последовательном переключении реостата в положения 3, 4 и 5, после чего двигатель достигает установившегося режима работы со значениями / о и п, определяемыми условиями М=М„ [см. равенства (10-7) и (10-8)].
Рис 10-3 Зависимость 1 ф М и п от времени при пуске двигателя
При пуске на холостом ходу М„ = М о. Ток 1 а - 1 а0 в этом случае мал и составляет обычно 3-8% от / н.
Заштрихованные на рис. 10-3 ординаты представляют собой, согласно выражению (10-2), значения избыточного, или динамического, момента
под воздействием которого происходит увеличение п.
Количество ступеней пускового реостата и величины их сопротивлений рассчитываются таким образом, чтобы при надлежащих интервалах времени переключения ступеней максимальные и минимальные значения 1 а на всех ступенях получились одинаковыми. По условиям нагрева ступени реостата рассчитываются на кратковременную работу под током.
Остановка двигателя производится путем его отключения от сети с помощью рубильника или другого выключателя. Схема рис. 10-2 составлена так, чтобы при отключении двигателя цепь обмотки возбуждения не размыкалась, а оставалась замкнутой через якорь. При этом ток в обмотке возбуждения после отключения двигателя уменьшается до нуля не мгновенно, а с достаточно большой постоянной времени. Благодаря этому предотвращается индуктирование в обмотке возбуждения большой э. д. с. самоиндукции, которая может повредить изоляцию этой обмотки.
Применяются также несколько видоизмененные по сравнению с рис. 10-2, а схемы пусковых реостатов, без контактной дуги д. Конец цепи возбуждения при этом можно присоединить, например, к контакту 2, и при работе двигателя последовательно с обмоткой возбуждения будут включены последние ступени пускового реостата. Поскольку их сопротивление по сравнению с R B = r B + R p B мало, то это не оказывает большого влияния на работу двигателя.
Автоматизировать переключение пускового реостата неудобно. Поэтому в автоматизированных установках вместо пускового реостата используют пусковые сопротивления (рис. 10-2, б), которые поочередно шунтируются контактами Kl, К2, КЗ автоматически работающих контакторов. Для упрощения схемы и уменьшения количества аппаратов число ступеней принимается минимальным (у двигателей малой мощности обычно 1-2 ступени).
Ни в коем случае нельзя допускать разрыва цепи параллельного возбуждения.
В этом случае поток возбуждения исчезает не сразу, а поддерживается индуктируемыми в ярме вихревыми токами. Однако этот поток будет быстро уменьшаться и скорость п, согласно выражению (10-7), будет сильно увеличиваться («разнос» двигателя). ° результате ток якоря значительно возрастет и возникнет круговой
огонь, вследствие чего возможно повреждение машины, и поэтому, в частности, в цепях возбуждения не ставят предохранителей и выключателей.
Ограничение пускового тока достигается также в случае питания цепи якоря при пуске от отдельного источника тока с регулируемым напряжением (отдельный генератор постоянного тока, управляемый выпрямитель). Параллельную обмотку возбуждения при этом необходимо питать от другого источника, с полным напряжением, чтобы иметь при пуске полный ток г в. Этот способ пуска применяют чаще всего для мощных двигателей, притом в сочетании с регулированием скорости вращения (см. § 10-4).
Пуск двигателей последовательного и смешанного возбуждения производится аналогичным образом. Схема пуска двигателя смешанного возбуждения ничем не отличается -от схемы пуска двигателя параллельного возбуждения (рис. 10-2), а схема пуска двигателя последовательного возбуждения упрощается за счет исключения параллельной цепи возбуждения.
Для изменения направления вращения (реверсирования) двигателя необходимо изменить направление тока в якоре (вместе с добавочными полюсами и компенсационной обмоткой) или в обмотке (обмотках) возбуждения.
§ 10-3. Регулирование скорости вращения и устойчивость работы двигателя
Способы регулирования скорости вращения двигателей постоян ного тока следуют из соотношений" (10-7) и (10-9). Возможны три способа регулирования скорости вращения.
1. Наиболее удобным, распространенным и экономичным является способ регулирования скорости путем изменения потока Ф 6 , т. е. тока возбуждения t B .
С уменьшением Фа, согласно выражению (10-7), скорость возрастает. Двигатели рассчитываются для работы при номинальном режиме с наибольшим значением Фе, т. е. с наименьшей величиной п. Поэтому практически можно только уменьшать Ф^.
Следовательно, рассматриваемый способ позволяет регулировать скорость вверх от номинальной. При таком регулировании к. п. д. двигателя остается высоким, так как мощность возбуждения мала, в частности мала мощность реостатов для регулирования тока возбуждения. К тому же при уменьшении i B мощность возбуждения Ш в уменьшается.
Верхний предел регулирования скорости вращения ограничивается механической прочностью машины и условиями ее коммутации.
При высоких скоростях коммутация ухудшается вследствие увеличения вибрации щеточного аппарата, неустойчивости щеточного контакта и возрастания реактивной э. д. с, а также вследствие увеличения максимального напряжения между коллекторными пластинами в результате ослабления основного поля и усиления при этом искажающего влияния поперечной реакции якоря (см. § 5-3).
Для увеличения диапазона регулирования п посредством ослабления поля в машинах малой и средней мощности с волновой обмоткой якоря иногда применяют раздельное питание катушек возбуждения отдельных полюсов. При этом в одной группе полюсов сохраняют i B = const и большой поток со значительным насыщением участков магнитной цепи, а в другой группе полюсов t B и поток уменьшают. Искажающее влияние поперечной реакции якоря под первой группой полюсов в этом случае будет проявляться значительно слабее. Так как в волновой обмотке напряжение между соседними коллекторными пластинами складывается из э. д. с. р секций, расположенных под всеми полюсами (см. § 3-5), то в результате такого регулирования потока полюсов распределение напряжения между пластинами будет более равномерным.
2. Другой способ регулирования скорости заключается во включении последовательно в цепь якоря реостата или регулируемого сопротивления R pa ,
Вместо выражения (10-7) при этом имеем
т. е. в реостате будет теряться 47,5% приложенного напряжения и столько же мощности, подводимой к цепи якоря. По этой причине
данный способ применяется в основном для двигателей небольшой мощности, а для более мощных двигателей используется редко и только кратковременно (пуско-наладочные режимы и т. д.).
3. Регулирование скорости осуществляется также путем регулирования напряжения цепи якоря. Так как работа двигателя при U > U H недопустима, то данный способ, согласно выражениям (10-7) и (10-9), дает возможность регулировать скорость также вниз от номинальной. К. п. д. двигателя при этом остается высоким, так как никаких добавочных, источников потерь в схему двигателя не вносится.
Однако в этом случае необходим отдельный источник тока с регулируемым напряжением, что удорожает установку.
Отметим, что регулирование скорости путем изменения 1 а невозможно, хотя такая возможность на первый взгляд вытекает" из равенства.(10-7). Дело в том, что, согласно равенству (10-3), двигатель при каждой скорости вращения должен развивать определенный момент М, равный моменту сопротивления приводимого механизма М„ при данном значении п. Но при этом в соответствии с выражением (10-8) при данном значении Ф 6 величина 1 а в двигателе будет при каждом значении М тоже вполне определенной.
Различные способы регулирования п более конкретно, применительно к двигателям с различными способами возбуждения; рассматриваются в последующих параграфах.
Условия устойчивости работы двигателя. При работе двигателя всегда возникают определенные возмущения режима работы (кратковременные колебания напряжения сети, случайные кратковременные изменения момента нагрузки на валу и т. д.). Такие возмущения чаще всего бывают небольшими и кратковременными, однако при этом происходят, хотя также небольшие и кратковременные, нарушения равенства моментов установившегося режима работы [см. выражение (10-3)], вследствие чего возникает момент М юв и изменяется скорость вращения.
Под устойчивостью работы двигателя понимается его способность вернуться к исходному, установившемуся режиму работы при малых возмущениях его работы, когда действие этих возмущений прекратится. Иными словами, работа двигателя называется устойчивой, если бесконечно малые в пределе возмущения его работы вызывают лишь столь же малые изменения величин, характеризующих режим его работы (например, скорость вращения, ток якоря и т. д.). Двигатель неустойчив в работе, если подобные малые возмущения приводят к большим изменениям режима работы. При неустойчивой работе небольшие кратковременные возмущения вызывают либо непрерывное изменение
режима (п, I a и т. д.) в каком-либо одном направлении, либо приводят к колебательному режиму работы с возрастанием амплитуд колебаний п, 1 а и т. д. Естественно, что в условиях эксплуатации необходимо обеспечить устойчивый режим работы двигателя. При неустойчивости двигателя нормальная его работа невозможна, и обычно происходит авария.
Неустойчивая работа возможна также и у генераторов. В § 9-7 была рассмотрена неустойчивость параллельной работы генераторов смешанного возбуждения при отсутствии уравнительного провода. Режим самовозбуждения генераторов постоянного тока (см. § 9-4) также в сущности представляет собой неустойчивый режим работы, так как i B и U непрерывно изменяются. Работа генератора параллельного возбуждения при R s = R B . Kp также неустойчива, так как если несколько изменить величину R B , то напряжение U значительно изменится, т. е. возрастет до некоторой конечной величины или упадет почти до нуля.
Устойчивость работы двигателя зависит от вида его механической характеристики М = f{n) и от вида зависимости момента сопротивления на валу от скорости вращения М ст = /(«) Вид последней зависимости определяется свойствами рабочей машины, приводимой в движение двигателем. Например, у металлорежущих станков, если установка резца не изменяется, М„ да const, т. е. М ст не зависит от скорости вращения, а у вентиляторов и насосов М„ ~ п 2 .
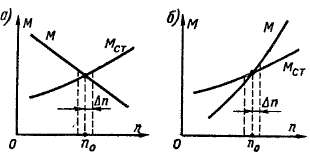
На рис. 10-4, а я б изображены два характерных случая работы двигателя. Установившемуся режиму работы (М = М„) со скоростью вращения п 0 соответствует точка пересечения указанных двух характеристик.
Если зависимости М = f (п) и М ст = / (п) имеют вид, изображенный на рис. 10-4, а, то при случайном увеличении п в результате возмущения на An тормозящий момент М сг станет больше движущего М (М ст > М) и поэтому двигатель будет затормаживаться, что заставит ротор вернуться к исходной скорости п 0 . Точно так же, если в результате возмущения скорость двигателя уменьшится на An, то будет М„ < М, поэтому ротор станет ускоряться и снова будет п = п 0 . Таким образом, в рассматриваемом
Рис. 10-4. Устойчивый (а) и неустойчивый (б) режимы работы двигателя
случае работа устойчива. Как следует из рис. 10-4, а, в этом случае
что и является признаком, или критерием, устойчивости работы двигателя.
При зависимостях М = f (п) и М ст = / (п) вида рис. 10-4, б работа неустойчива. Действительно, при увеличении п от п = п 0 до п = п 0 + An будет М > М ст, возникнет избыток движущего момента, скорость п начнет нарастать, причем избыточный момент М - УИ СТ увеличится еще больше, п еще возрастет и т. д. Если в результате возмущения п = п 0 - An, то М< М сг и п будет непрерывно уменьшаться. Поэтому работа в точке М = М ст и п = п 0 невозможна. Как следует из рис. 10-4, б, в этом случае
что является признаком неустойчивости работы двигателя.
Из изложенного следует, что двигатель с данной механической характеристикой М = f (n) может работать устойчиво или неустойчиво в зависимости от характеристики М ст = / (п) рабочей машины. Возникновение неустойчивости наиболее вероятно при такой механической характеристике двигателя М = f (п) или п = f (M), когда Мига увеличиваются или уменьшаются одновременно (рис. 10-4, б). В частности, в этом случае работа неустойчива при Мст = /(«)= const (например, металлорежущие станки). Поэтому двигателей с такими механическими характеристиками не строят.
Изложенное здесь в равной мере относится к устойчивости двигателей как постоянного, так и переменного тока, а также любых видов двигателей.
Изменение режима работы. Двигатели постоянного тока, как, впрочем, и двигатели переменного тока, обладают при соблюдении условий устойчивости замечательной способностью автоматически, без внешнего регулирующего воздействия, приспосабливаться-к изменившимся условиям работы. В этом смысле можно сказать, что электрические двигатели обладают свойством саморегулирования. Проиллюстрируем сказанное на примере двигателя параллельного возбуждения.
Допустим, что такой двигатель работает при U = const, i e = = const и, следовательно, Фв « const и нагрузочный момент М„, развиваемый рабочей машиной, увеличивается. Тогда М < M zr , возникает М тн < 0 [см. выражение (10-2)] и п начинает умень-

шаться. Но при этом будет уменьшаться также Е а, ток 1 а [см. выражение (10-5)] и момент М Гсм. выражение (10-8)] начнут увеличиваться, причем это будет происходить до тех пор, пока снова не наступит равновесие моментов М = М„. Аналогичным образом изменяется также режим, если М„ уменьшится, причем в этом случае я и Е а начнут увеличиваться, а 1 а и М - уменьшаться до тех пор, пока снова будет М = М ст и М тш = 0.
Допустим теперь, что с помощью реостата R p в (см. рис. 10-2) произведено уменьшение i B . При этом Фв будет уменьшаться, однако вследствие механической инерции ротора скорость п в первый момент не изменится. Тогда, согласно выражению (10-6), Е а уменьшится, а вследствие этого 1 а и М возрастут [см. выражения (10-5) и (10-8)1. При этом будет М > М„, в соответствии с равенством (Ю-2) Мдин > 0, и скорость п начнет увеличиваться. Это вызовет, согласно тем же соотношениям, увеличение Е а и уменьшение 1 а и М до тех пор, пока снова не наступит равновесие моментов М = = М„ и М дин = 0 (рис. 10-5). При увеличении i B явления развиваются в обратном направлении. Необходимо отметить, что резких изменений i B при регулировании допускать нельзя, так как U и Е а [см. выражение(10-5)] являются близкими величинами и небольшое изменение Фв и Е а ведет к большим изменениям / а и М.
Аналогичным образом происходит переход к новому режиму при изменении других внешних условий (например, введение сопротивления в цепь якоря и т. д.), а также в двигателях с другими способами возбуждения.
Из изложенного следует, что поведение двигателя при установившемся режиме работы и переходах к новому режиму работы всецело определяется уравнениями равновесия моментов (10-2) и напряжения цепи якоря (10-4).
§ 10-4. Двигатели параллельного возбуждения
Естественные скоростная и механическая характеристики. Рассмотрим более подробно характеристики двигателя параллельного возбуждения, которые определяют его рабочие свойства.
Скоростная и механическая характеристики двигателя определяются равенствами (10-7) и (10-9) при U = const и i B = const. При отсутствии дополнительного сопротивления в цепи якоря эти характеристики называются естественными.
Рис. 10-5. Переход двигателя
параллельного возбуждения
к новому режиму работы при
уменьшении потока
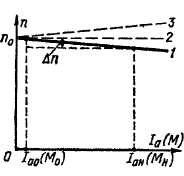
Если щетки находятся на геометрической нейтрали, при увеличении 1 а поток Фв несколько уменьшится вследствие действия поперечной реакции якоря. В результате этого скорость п, согласно выражению (10-7), будет стремиться возрасти. С другой стороны, падение напряжения R a I a вызывает уменьшение скорости. Таким образом, возможны три вида скоростной характеристики, изображенные на рис. 10-6; 1 - при преобладании влияния RJ a \ 2 - при взаимной компенсации влияния RJ a и уменьшения Ф 6 ; 3 - при преобладании влияния уменьшения Фа.
Ввиду того что изменение Ф в относительно мало, механические характеристики п = f (M) двигателя параллельного возбуждения,
определяемые равенством (10-9), при U = const и г в = const совпадают по виду с характеристиками п = f (I a) (рис. 10-6). По этой же причине эти характеристики практически прямолинейны.
Характеристики вида 3 (рис. 10-6) неприемлемы по условиям устойчивости работы (см. § 10-3). Поэтому двигатели параллельного возбуждения изготовляются со слегка падающими характеристиками вида / (рис. 10-6). В современных высокриспользованных машинах ввиду довольно сильного насыщения зубцов якоря влияние поперечной реакции якоря может быть настолько большим, что получить характеристику вида / (рис. 10-6) невозможно. Тогда для получения такой характеристики на полюсах помещают слабую последовательную обмотку возбуждения согласного включения, н. с. которой составляет до 10% от н. с. параллельной обмотки возбуждения. При этом уменьшение Фв под воздействием поперечной реакции якоря частично или полностью компенсируется. Такую последовательную обмотку возбуждения называют стабилизирующей, а двигатель с такой обмоткой по-прежнему называется двигателем параллельного возбуждения.
Изменение скорости вращения An (рис. 10-6) при переходе от холостого хода (/„ = 1 а0) к номинальной нагрузке (1 а - 1 аи) у двигателя параллельного возбуждения при работе на естественной характеристике мало и составляет 2-8% от п н. Такие слабо падающие характеристики называются жесткими. Двигатели параллельного возбуждения с жесткими характеристиками применяются в установках, в которых требуется, чтобы скорость вращения при изменении нагрузки сохранялась приблизительно постоянной (металлорежущие станки и пр.).
Рис. 10-6. Виды естественных скоростных и механических характеристик двигателя параллельного возбуждения
Регулирование скорости посредством ослабления магнитного потока производится обычно с помощью реостата в цепи возбуждения /? р в (см. рис. 9-1, б; 10-2). При отсутствии добавочного сопротивления в цепи якоря (R pa = 0) и U = const характеристики п - \ (1 а) и п = / (М), определяемые равенствами (10-7) и (10-9), для разных значений R ps , i B или Фа имеют вид, показанный да рис. 10-7. Все характеристики п = f (I a) сходятся на оси абсцисс (п = 0) в общей точке при весьма большом токе 1 а, который, согласно выражению (10-5), равен
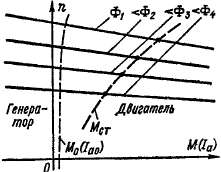
Рис. 10-7. Механические и скоростные характеристики двигателя параллельного возбуждения при разных потоках возбуждения
Ia=U/R a .
Однако механические характеристики пересекают ось абсцисс в разных точках.
Нижняя характеристика на рис. 10-7 соответствует номинальному потоку. Значения п при установившемся режиме работы соответствуют точкам пересечения рассматриваемых характеристик с кривой М ст = f (п) для рабочей машины, соединенной с двигателем (штриховая ли«ия на рис. 10-7).
Точка холостого хода двигателя (М = М о, 1 а = / а0) лежит несколько правее оси ординат на рис. 10-7. С увеличением скорости вращения п вследствие увеличения механических потерь М о и 1 а0 также увеличиваются. Если в этом режиме с помощью приложенного.извне момента вращения начать увеличивать скорость вращения п, то Е а [см. выражение (10-6)] будет увеличиваться, а 1 а и М будут, согласно равенствам (10-5) и (10-8), уменьшаться. При 1 а = 0 и М = 0 механические и магнитные потери двигателя покрываются за счет подводимой к валу мехнической мощности, а при дальнейшем увеличении скорости / о и М изменят знак и двигатель перейдет в генераторный режим работы (участки характеристик на рис. 10-7 левее оси ординат).
Двигатели общего применения допускают по условиям коммутации регулирование скорости ослаблением поля в пределах 1: 2, Изготовляются также двигатели с регулированием скорости таким способом в пределах до 1: 5 или даже 1: 8, но в этом случае для ограничения максимального напряжения между коллекторными пластинами (см. § 5-3) необходимо увеличить воздушный зазор, регулировать поток по отдельным группам полюсов (см. § 10-3) или применить компенсационную обмотку. Стоимость двигателя при этом увеличивается.
Регулирование скорости сопротивлением в цепи якоря, искусственные механическая и скоростная характеристики. Если последовательно в цепь якоря включить добавочное сопротивление R pa (рис. 10-8, а), то вместо выражений (10-7) и (10-9) получим
Сопротивление R pa может быть регулируемым и должно быть рассчитано на длительную работу. Цепь возбуждения должна быть включена на напряжение сети.
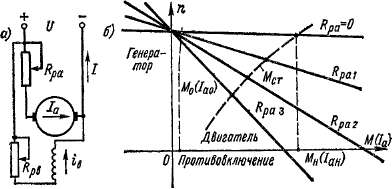
Рис. 10-8. Схема регулирования скорости вращения двигателя параллельного возбуждения с помощью сопротивления в цепи якоря (а) и соответствующие механические и скоростные характеристики (б)
Характеристики п - f (М) и п = f (I a) для различных значений /? рг = const при U - const и i B = const изображены на рис. 10-8, б (Rpai < Rpaz < ^ р оз)- Верхняя характеристика (R pa = 0) является естественной. Каждая из характеристик пересекает ось абсцисс (п - 0) в точке с
Продолжения этих характеристик под осью абсцисс на рис. 10-8 соответствуют торможению двигателя противовключением. В этом случае п < 0, э. д. с. Е а имеет противоположный знак и складывается с-напряжением сети U, вследствие чего
а момент двигателя М действует против направления вращения и является поэтому тормозящим.
Если в режиме холостого хода (1 а = 1 п0) с помощью приложенного извне момента вращения начать увеличивать скорость враще-ьия, то сначала достигается режим 1 а = 0, а затем 1 а изменит направление и машина перейдет в режим генератора (участки характеристик на рис. 10-8, б слева от оси ординат).
Как видно из рис. 10-8, б, при включении R pa характеристики становятся менее жесткими, а при больших величинах R pa - круто падающими, или мягкими.
Если кривая момента сопротивления М ст = / (п) имеет вид, изображенный на рис. 10-8, б штриховой линией, то значения п при установившемся режиме работы для каждого значения R pa
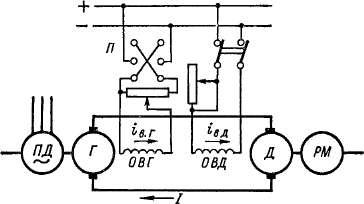
Рис 10-9 Схема агрегата «генератор-двигатель» для регулирования скорости двигателя независимого возбуждения
определяются точками пересечения соответствующих кривых. Чем больше R pa , тем меньше п и ниже к. п. д.
Регулирование скорости посредством изменения напряжения якоря может осуществляться с помощью агрегата «генератор-двигатель» (Г - Д), называемого также агрегатом Леонарда (рис. 10-9). В этом случае первичный двигатель ПД (переменного тока, внутреннего сгорания и т. п.) вращает с постоянной скоростью генератор постоянного тока Г. Якорь генератора непосредственно приключен к якорю двигателя постоя"нного тока Д, который служит приводом рабочей машины РМ. Обмотки возбуждения генератора ОВГ и двигателя ОВД питаются от независимого источника - сети постоянного тока (рис. 10-9) или от возбудителей (небольших генераторов постоянного тока) на валу первичного двигателя ПД. Регулирование тока возбуждения генератора t B г должно производиться практически от нуля (на рис. 10-9 с помощью реостата, включенного по потенциометрической схеме). При необходимости реверсирования двигателя надо изменить полярность генератора (на рис. 10-9 с помощью переключателя Я).
Пуск двигателя Д и регулирование его скорости осуществляют следующим образом. При максимальном г в д и г в г = 0 производят пуск первичного двигателя ПД. Затем плавно увеличивают i g г, и при небольшом напряжении генератора U двигатель Д придет во вращение. Регулируя, далее, U в пределах до U =* U H , можно получить Любые скорости вращения двигателя до п = и н. Дальнейшее увеличение п возможно путем уменьшения t B д. Для реверсирования двигателя уменьшают t B г до нуля, переключают ОВГ и снова увеличивают i B т от значения i B r = 0.
Когда рабочая машина создает резко пульсирующую нагрузку (например, некоторые прокатные станы) и нежелательно, чтобы пики нагрузки полностью передавались первичному двигателю или в сеть переменного тока, двигатель Д можно снабдить маховиком (агрегат Г-Д-М, или агрегат Леонарда - Ильгнера). В этом случае при понижении п во время пика нагрузки часть этой нагрузки покрывается за счет кинетической энергии маховика. Эффективность действия маховика будет больше при более мягкой характеристике двигателя ПД или Д.
В последнее время все чаще двигатель ПД и генератор Г заме-г няют ртутным или полупроводниковым выпрямителем с регулируемы!* напряжением. В этом случае рассматриваемый агрегат называют также вентильным (ионным, тиристорным)" п р и в о д о м.
Рассмотренные агрегаты используются при необходимости регулирования скорости вращения двигателя с высоким к. п. д. в широких пределах - до 1: 10 й более (крупные металлорежущие станки, прокатные станы и т. д.).
Отметим, что изменение U с целью регулирования п по схеме рис. 9-1, 0> и 10-8, а не дает желаемых результатов, так как одновременно с изменением напряжения цепи якоря изменяется пропорционально U также ток возбуждения. Так как регулирование V можно производить только от значения U - U K вниз, то вскоре магнитная цепь окажется ненасыщенной, вследствие чего U и t e будут изменяться пропорционально друг другу. Согласно равеяству (10-7), п при этом существенным образом не меняется.
В последнее время все больше распространяется так называемое импульсное регулирова н,.и е двигателей постоянного" зша. При этом цепь якоря двигателя питается от источника па-стйЯнного тока с постоянным напряжением через тиристоры, которые, периодически, с частотой 1000-ЗШО гц включаются" и отключаются. Чтобы сгладить пр» этом кривую тока якоря, на его зажимах подключаются конденсаторы. Напряжение на зажимах-якоря в этом случае практически постоянно и пропорционально отношению времени включения тиристоров ко времени-продолжи-тельдасти всего цикла. Таким образом, импульсный метод позво-
ляет регулировать скорость вращения даигателя при его питании от источника с постоянным напряжением в широких пределах без реостата в цепи якоря и практически без дополнительных потерь. Таким же образом, без пускового реостата и без дополнительных потерь, может производиться пуск двигателя.
Импульсный способ регулирования в экономическом отношении весьма выгоден для управления двигателями, работающими в режимах переменной скорости вращения с частыми пусками, например на электрифицированном транспорте.
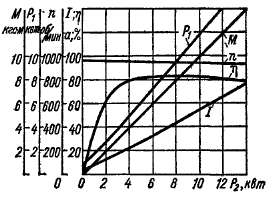
Рабочие характеристики представляют собой зависимости потребляемой мощности Р ъ < потребляемого тока /, скорости п, момента М и к. п. д. т] от полезной мощности Р 2 при U = const и неизменных положениях регулирующих реостатов. Рабочие характеристики двигателя параллельного возбуждения малой
Рис. 10-10. Рабочие характеристики
двигателя параллельного возбуждения
Р а = 10 кет, U H = 220 в, « н =
950 об/мин
мощности при отсутствии добавочного сопротивления в цепи якоря представлены на рис. 10-10.
Одновременно с увеличением мощности на валу Р 2 растет и момент на валу М. Поскольку с увеличением Р % и М скорость п несколько уменьшается, то М = Р 2 /п растет несколько быстрее Р 2 . Увеличение Р 2 и М, естественно, сопровождается увеличением тока двигателя /. Пропорционально / растет также потребляемая из сети мощность Р г. При холостом ходе (Р 2 = 0) к. п. д. ц = 0, затем с увеличением Р 2 сначала ц быстро растет, но при больших нагрузках в связи с большим ростом потерь в цепи якоря г\ снова начинает уменьшаться.
§ 10-5. Двигатели последовательного возбуждения
Естественные скоростная и механическая характеристики, об ласть применения. В двигателях последовательного возбуждения ток якоря одновременно является также током возбуждения: г в = 1 а = /■ Поэтому поток Фа изменяется в широких пределах и можно написать, что
Ф 6 = £ф/. (10-18)
Коэффициент пропорциональности &ф в значительном диапазоне нагрузок, при / < / н, является практически постоянным, и лишь
при / > (0,8 н- 0,9) / н вследствие насыщения магнитной цепи кф начинает несколько уменьшаться.
При использовании соотношения (10-18) для двигателя последовательного возбуждения вместо выражений (10-7), (10-9) и (10-8) получим
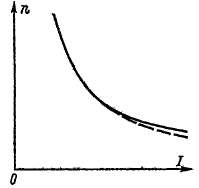
Скоростная характеристика двигателя [см. выражение (10-19)), представленная на рис. 10-11, является мягкой и имеет гиперболический характер. При & ф = const вид кривой п - f (/) показан штриховой линией. При малых / скорость двигателя становится недопустимо большой. Поэтому работа двигателей последовательного возбуждения, за исключением самых маленьких, на холостом ходу не допускается, а использование ременной передачи неприемлемо. Обычно минимально допустимая нагрузка Р 2 = = (0,2 -f- 0,25)Р н.
Естественная механическая характеристика двигателя последовательного возбуждения п = / (М) в соответствии с соотношением (10-20) показана на рис. 10-13 (кривая 1).
Поскольку у двигателей параллельного возбуждения М ^ /, а у двигателей последовательного возбуждения приблизительно М~/ ! и при пуске допускается / = (1,5 -г- 2,0) / н, то двигатели последовательного возбуждения развивают значительно больший пусковой момент по сравнению с двигателями параллельного возбуждения. Кроме того, у двигателей параллельного возбуждения п яа const, а у двигателей последовательного возбуждения, согласно выражениям (10-19) и (10-20), приблизительно (при R a = 0)
Рис 10-11. Естественная скоростная характеристика двигателя последовательного возбуждения
а у двигателей последовательного возбуждения
Р 2 = 2ппМ~ VM.
Таким образом, у двигателей последовательного возбуждения при изменении момента нагрузки М ст = М в широких пределах мощность изменяется в меньших пределах, чем у двигателей параллельного возбуждения.
Поэтому для двигателей последовательного возбуждения менее опасны перегрузки по моменту. В связи с этим двигатели последовательного возбуждения имеют существенные преимущества в случае тяжелых условий пуска и изменения момента нагрузки в широких пределах. Они широко применяются для электрической тяги (трамвай, метро, троллейбусы, электровозы и тепловозы на железных дорогах) и в подъемно-транспортных установках.
Ruin ^ша Рис. 10-12. Схемы регулирования скоро-
Отметим, что при повышении скорости вращения двигатель последовательного возбуждения в режим генератора не переходит. На рис. 10-11 это отражено в том, что характеристика п - f (/) оси ординат не пересекает. Физически это объясняется тем, что при переходе в режим генератора, при заданном направлении вращения и заданной полярности напряжения, направление тока должно изменяться на обратное, а направление э. д. с. Е а и полярность полюсов должны сохраняться неизменными, однако последнее при изменении направления тока в обмотке возбуждения невозможно. Поэтому Для перевода двигателя последовательного возбуждения в режим генератора необходимо переключить концы обмотки возбуждения.
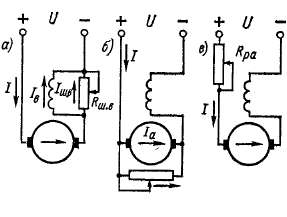
Регулирование скорости посредством ослабления поля. Регули рование п посредством ослабления поля производится либо путем шунтирования обмотки возбуждения некоторым сопротивлением ^ш.в (рис. 10-12, а), либо уменьшением числа включенных в работу витков обмотки возбуждения. В последнем случае должны быть предусмотрены соответствующие выводы из обмотки возбуждения.
Так как сопротивление обмотки возбуждения 7? в и падение напряжения на нем малы, то # ш- в также должно быть мало. Потери
в сопротивлении R m B поэтому тоже малы, а суммарные потери на возбуждение при шунтировании даже уменьшаются. Вследствие этого к. п. д. двигателя остается высоким, и такой способ регулирования широко применяется на практике.
При шунтировании обмотки возбуждения ток возбуждения с величины / уменьшается до
и скорость п соответственно увеличивается. Выражения для скоростной и механических характеристик при этом получим, если
в равенствах (10-19) ~ и (10-20) заменим k&
на kk 0
B , где
представляет собой коэффициент ослабления возбуждения. При регулировании скорости изменением числа витков обмотки возбуждения
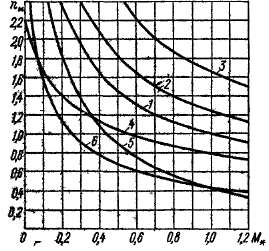
Ряс. 40-13. Механические характеристик» двигателя последовательного возбуждения при разных способах регулирования скорости вращения
На рис. 10-13 показаны (кривые /, 2, 3) характеристики я = / (М) для этого случая р&< гулирования скорости при нескольких значениях & ов (значению k 0 в = 1 соответствует есте* ственна"я характеристика /, kp r , =*= 0,6 - кривая 2 и & о.. я = 0,3 - кривая 5). Характеристики д£йьг в относительных единицах и соответствуют случаю, когда кф » const и R a x =0,1.
Регулирование скорости путем шунтирования якоря. При шун*и-ровании якоря (рис. 10-12, б) ток и поток возбуждения возрастают, а «скорость уменьшается. Так как падение иааряжеййя R^f майо Я поэтому можно принять- R B « 0, то сопротивление R^ a щшт* чест находится под полным напряжением сети, еги ведший^" долина быть значительной, потери в нем оудут велики и к,*й. д. сильно уменьшится.
Йроме того, шунтирование якоря эффективно только трр|й» когда магнитная цепь не насыщена. В связи с этим шунтирование якоря на практике используется редко.
На рис. 10-13 кривая 4 n = f(M) при
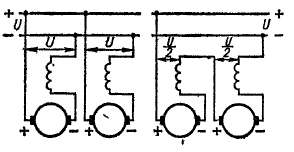
Рис. 10-14. Параллельное и последовательное включение двигателей последовательного возбуждения для изменения скорости вращения
Регулирование скорости включением сопротивления в цепь якоря
(рис. 10-12, в). Этот способ позволяет регулировать п вниз от номинального значения. Так как одновременно при этом значительно уменьшается к. п. д., то такой способ регулирования находит ограниченное лриме-нение.
Выражения для скоростной и механической характеристик в этом случае получим, если в равенствах (10-20) и (10-21) заменим R a на Ra + Rpa- Характеристика п = f (M) для такого способа регулирования скорости при R P a* = 0,5 изображена на рис. 10-13 в виде кривой 5.
Регулирование скорости изменением напряжения. Этим способом можно регулировать п вниз от номинального значения с сохранением высокого к. п. д. Рассматриваемый способ регулирования широко применяется в транспортных установках, где на каждой ведущей оси устанавливается отдельный двигатель и регулирование осуществляется путем переключения двигателей с параллельного включения в сеть на последовательное (рис. 10-14). На рис. 10-13 кривая 6 представляет собой характеристику п = / (М) для этого случая при U = 0,5 U n .
§ 10-6. Двигатели смешанного возбуждения
При встречном включении последовательной обмотки возбуждения двигателя смешанного возбуждения поток Ф в с увеличением нагрузки будет уменьшаться. Вследствие этого характеристики п ~ f (I) и п = / (М) будут иметь характер кривой 3 на рис. 10-6. Так как работа при этом обычно неустойчива, то двигатели с встречным включением последовательной обмотки возбуждения не применяются.
При согласном включении последовательной обмотки возбуждения поток Фб с увеличением нагрузки возрастает. Поэтому такой Двигатель смешанного возбуждения имеет более мягкую механическую характеристику по сравнению с двигателем параллельного
возбуждения, но более жесткую по сравнению с двигателем последовательного возбуждения (рис. 10-15). В зависимости от назначения двигателя доля последовательной обмотки в создании полной н. с. возбуждения может меняться в широких пределах.
Скорость вращения двигателей смешанного возбуждения обычно регулируется так же, как и в двигателях параллельного возбуждения, хотя в принципе можно использовать также способы, применяемые в двигателях последовательного возбуждения.
Двигатели смешанного возбуждения применяются в условиях, когда требуется большой пусковой момент, быстрое ускорение при пуске и допустимы значительные изменения скорости вращения при изменении нагрузки. Эти двигатели используются также в случаях, когда момент нагрузки изменяется в широких пределах, так как при этом мощность двигателя снижается, как и у двигателя с последовательным возбуждением. В связи с этим двигатели смешанного возбуждения применяются для привода на постоянном токе компрессоров, строгальных станков, печатных машин, прокатных станов, подъемников и т. д. В последнее время двигатели смешанного
возбуждения используются также для электрической тяги, так как при этом легче, чем в случае применения двигателей последовательного возбуждения, осуществляется торможение под* вижных составов с возвращением энергии в контактную сеть постоянного тока путем перевода машины в генераторный режим работы.
§ 10-7. Нормальные машины постоянного тока, изготовляемые электромашиностроительными заводами СССР
Народное хозяйство СССР предъявляет большой спрос на генераторы и двигатели постоянного тока нормальной конструкции, рассмотренные в предыдущей и настоящей главах. Больше всего требуется машин малой мощности (до 20-30 кет). Такие машины изготовляются по способу массового или поточного производства. Более мощные машины выпускаются крупносерийно или мелко» серийно. Самые крупные машины, мощностью в тысячи киловатт, изготовляются обычно способом индивидуального производства, т. е. каждая машина с определенными техническими данными выпускается в небольшом количестве.
Рис. 10-15. Естественные механические характеристики двигателей параллельного (1), последовательного (2) и смешанного возбуждения с согласным включением последовательной обмотки (3)
Машины массового и серийного производства проектируются в виде серий, охватывающих определенный диапазон мощностей, скоростей вращения и напряжений. Машины данной серии характеризуются общностью конструктивных решений, технологии производства, применяемых материалов и т. д. В пределах серии стремятся к возможно более широкой унификации узлов и деталей машин. Это позволяет повысить производительность труда и удешевить производство машин. Кроме основного исполнения машин, в данной серии могут предусматриваться также определенные модификации: по степени защиты от воздействия внешней среды (см. § 8-5), по способу крепления машин (на лапах, фланцевые) и т. д. Отдельным заводам обычно поручают изготовление машин определенных участков серии. Время от времени, по мере совершенствования способов производства, появления материалов повышенного качества, возникновения новых потребностей народного хозяйства, производится усовершенствование или модернизация данной серии машин либо разрабатывается новая серия машин с повышенными технико-экономическими показателями, заменяющая старую.
В настоящее время электромашиностроительные заводы СССР изготовляют машины постоянного тока ряда серий. Основной из них является единая серия нормальных машин постоянного тока, имеющая обозначение П и заменившая ря"д более узких старых серий машин.
Основная часть серии П охватывает генераторы и двигатели с номинальной мощностью 0,3-200 mm при п = 1500 об/мин. При других скоростях вращения номинальные мощности машин соответственно изменяются. Эта часть серии разбита на 11 габаритов (размеров). Машины каждого габарита имеют определенный диаметр якоря D ay а именно:
|
Номер габарита |
|||||||||||
|
D a , мм |
Каждый габарит включает в себя машины с двумя различными Длинами сердечника якоря. Это позволяет использовать технологическую оснастку данного габарита (штампы якоря и полюсов и пр.) и различные детали (щиты, подшипниковые узлы и пр.) для изготовления машин разной мощности при одинаковой скорости вращения. Тип П81, например, обозначает машину серии П, 8-го габарита, с более коротким якорем, а П82 - с более длинным я корем.
Основное исполнение машины серии П одиннадцати габаритов - брызгозащищенное. Предусмотрена также модификация с закрытым исполнением. Все машины изготовляются без компенсационной обмотки, двигатели имеют легкую последовательную стабилизирующую обмотку возбуждения, генераторы имеют смешанное возбуждение. Напряжение двигателей ПО или 220 в (верхний, более мощный участок серии, - только 220 в) Напряжение генераторов 115 или 230 в (верхний участок - только 230 в). Предусмотрено также изготовление генераторов для зарядки аккумуляторных батарей с С/ н = 136 в и 1/ н = 270 а, с регулированием напряжения в пределах 110-160 в и 220-320 в. Генераторы выпускаются с номинальными скоростями вращения 1450 и 2850 об/мин, а двигатели основного исполнения - с номинальными скоростями вращения (при полном возбуждении) 600, 750, 1000, 1500 и 3000 обfмин. Коллекторы машин 1-б-го габаритов выполняются на пластмассе.
Поскольку в каждом габарите имеются машины с двумя длинами сердечника якоря и машины одного габарита и одной длины изготовляются на ряд скоростей вращения, количество разновидностей машин получается достаточно большим.
Таблица IQ-t
Технические данные двигателей серии П брызгозащищенного исполнения на (/„ = 220 в и #„ = 1500 об]мин
|
■Р а, кет |
Вес кг |
Р № нет |
Вес, ке |
||||
Все машины с дащщм условным обозначением (например, ГО2) имеют одинаковые размеры н изготовляются из одинаковых деталей {sa исключением обмоток). В табл, 1СМ для иллюстраций показа-телей серии приведены некоторое даиние по двигателям ей**= «= 1500 об/мин. Дйигатели тега Щ условного обозначение, йо с меньшей скоростью га н> имеют sieawpy» мощность Р$ и нескольку меньший к. п. д, а двигателя еКжльщей скоростью п^ ~* наоборот
Мощность и к. п. д. генераторов с п н = 1450 об/мин примерно такие же, как у двигателей сп н = 1500 об /мин.
Серия П (1 - 11-й габариты) имеет также модификацию двигателей с широкими диапазонами регулирования скорости вращения путем ослабления поля: 1: 2,25; 1: 3; 1: 4; 1: 6 и 1: 8. Номинальные (наименьшие для данного двигателя) скорости вращения при этом находятся в пределах 200-1500 об/мин. Максимальные скорости вращения составляют 3000-3450 об/мин.
Для двигателей с диапазонами регулирования скорости вращения 1: 6 и 1: 8 предусмотрено раздельное питание катушек обмотки возбуждения с целью независимого регулирования потоков отдельных полюсов (см. § 10-3).
Серия машин постоянного тока П включает в себя и более"мощные машины. Этот участок серии охватывает габариты от 12-го до 17-го; в каждом габарите также имеются две длины якоря. Двигатели этого участка изготовляются на {/„ = 220, 330, 440 и 660 в, на мощности от 55 mm при п я = 300 об/мин до 1400 кет при 1000 обIмин. Все двигатели имеют компенсационную обмотку и могут быть использованы для привода вентиляторов, насосов, мелких и средних прокатных станов и т. д. Изготовляются также генераторы каждого типоразмера.
Кроме серии П, имеется ряд других серий машин постоянного тока более специализированного назначения (металлургические, крановые, тяговые и пр.). В эксплуатации находится также много машин старых серий, изгртовление которых прекращено. В частности, до введения в производство серии П в течение многих лет выпускались машины серии ПН.
В настоящее время машины постоянного тока строятся обычно с напряжением на коллекторе не более £/ й = 1500 в (тяговые двигатели магистральных электровозов постоянного тока.) Однако чаще-всего машины постоянного тока выпускаются на напряжения до 750-900 в, так как с увеличением напряжения условия работы коллектора и щеток усложняются и машина удорожается.
Более мощные машины изготовляются также с большим номинальным напряжением, чтобы ограничить по возможности величину тока якоря. В некоторых случаях крупные машины выпускаются с двумя якорями на одном валу.
Выводы обмоток машины постоянного тока, согласно ГОСТ 183-66, обозначаются следующим образом: Я1-Я2-якорь, К1- К.2-компенсационная обмотка, Д1-Д2-обмотка добавочных полюсов, С1-С2 - последовательная (сериесная) обмотка возбуждения, Ш1 - Ш2 - параллельная (шунтовая) обмотка возбуждения.
Более подробные данные о сериях электрических машин приводятся в специальных каталогах.